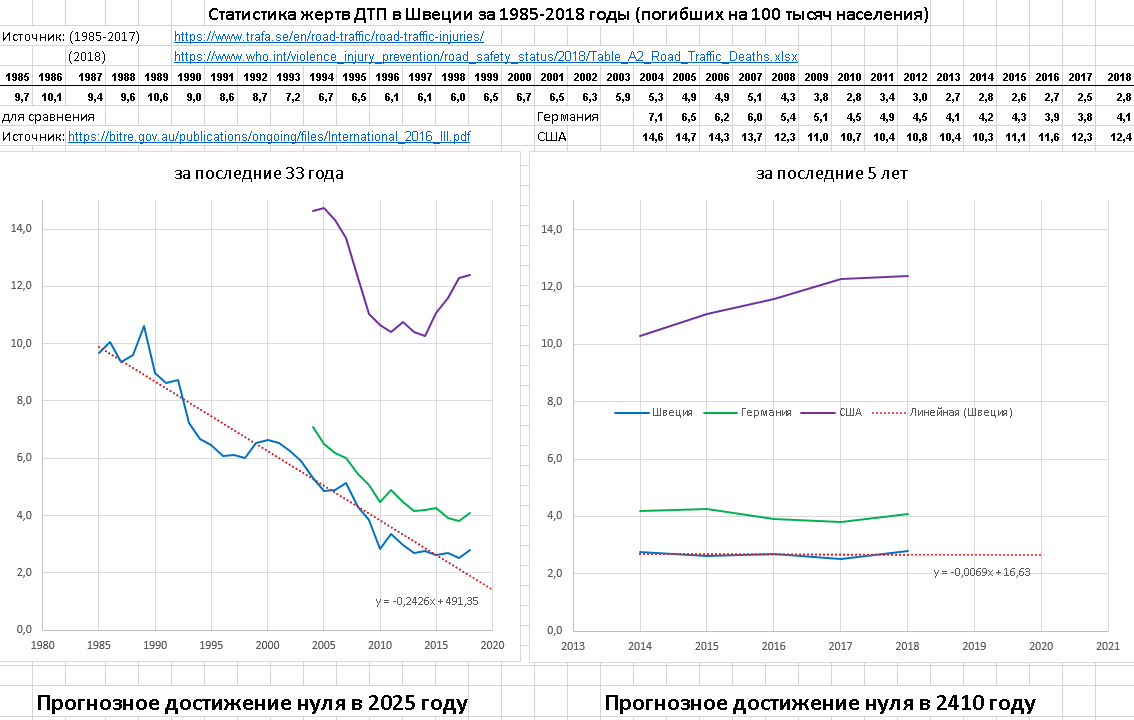
The crisis of the concepts of improving road safety and a new concept of its solution Contrary to the widely tolerated programs of zero tolerance for road accident victims, the number of fatalities in the world continues to grow. And not only at the expense of the third world countries, but also at the expense of countries implementing Vision Zero, where lately the number of the dead has ceased to decline and even began to grow. On the face of a clear crisis direction. Let us examine its causes by analyzing the main generally accepted concepts of improving road safety (RTS) and consider a new concept:
Tougher penalties Enhance security by improving transport and infrastructure Enhancing security through the reduction of transport and infrastructure (Vision Zero) The prospect of replacing a human driver with a computer New concept: “Instead of a safe car, a safe transport system” about the author upgreat.one competition.ekologurban.livejournal.com Analysis of existing road safety concepts Vision Zero requires to reduce the speed of transport to a safe 50 or even 30 km / h. But this is absurd! Let us then immediately reduce the speed to zero, or ban cars altogether. No cars, no dead from cars. That is, the best medicine is the guillotine. But before that (in the second concept), solutions were developed to increase safety without reducing speed. Vision Zero offers to physically spread pedestrians and vehicles, making all pedestrian crossings off-street. Yes, pedestrian safety will increase, but at the expense of reducing the convenience of pedestrians. And for older people in general fatal, since not every person can physically go up to the third floor, and then descend. And the tremendous price of extra-public transitions forced us to abandon this idea even in small and rich Sweden. However, in many countries, nodding at Vision Zero, they continue to attack the same rake. Vision Zero offers all country roads to do with the separation barrier in the middle. The idea is good, only for overtaking opportunities, all roads will have to be made in four lanes (two lanes in each direction). But it turned out to be too expensive even for small and rich Sweden. Therefore, we decided to save money and do not four, but three-lane roads with a “meandering lane”. Has security improved? Yes, it has risen, only it is silent, because of this, throughput has decreased on the THIRD! Paid for three bands, and bandwidth is equal to two bands. Discrimination motorists. Here, without comment, any discrimination is unacceptable. But the principle of fraud is the same, improving one at the expense of the other. Robotic mobile industry is finally becoming more realistic ). Thus, by 2019, it became obvious that the promising concept of increasing security at the expense of the autopilot was at least postponed for an indefinite time.Instead of a safe car, a safe transport system “A person is responsible for everything. Electronics gives prompts (systems for marking, road signs, blind spots control, etc.) and can execute one last driver command (stay in the lane, change lane, maintain distance, park). The electronics can block the driver’s unambiguously dangerous actions (emergency braking systems). ” instead of writing meaningless penalties for traffic violations that have already been committed, we need the well-known “fool protection” system, which will not even allow deliberately to violate the traffic rules. And although an absolutely safe car is impossible (if you do not crash, you will crash into you), it is easy to create an absolutely safe centralized transport system that can guarantee 100% safety with an accuracy of technical malfunction.Consider the principle of "ITS SPRUT" (In the center the view from the car, when it is still possible to stop) На фото вид с камеры передвижного варианта инфраструктуры «ИТС СПРУТ» Проблема не только в человеческом факторе Так как вся дорожная сеть находится под постоянным контролем системы «ИТС СПРУТ», то абсолютно все перекрёстки и пешеходные переходы являются светофорно-регулируемыми. Причём для этого вообще не нужны реальные светофоры, так как все сигналы передаются непосредственно на индивидуальные светофоры в каждый автомобиль. Надо отказаться от существующего способа регулировки перекрёстка, когда зелёный горит одновременно всем участникам дорожного движения одного из направлений (прямо, налево, направо + прямо для пешеходов, имеющих приоритет). Эта проблема характерна как для двухфазного, так и четырёхфазного режима светофоров. VIDEO Пример моделирования невозможности «выезда на встречку» Аналогично моделируются и все остальные причины ДТП Conclusion Source: https://habr.com/ru/post/439636/ More articles: Inside one of America's latest pencil factories In the Russian Federation buy power stations for mining cryptocurrency Processors "Baikal" come in retail EDS video stream Standard Universe Sirens Once and for all deal with irregular verbs in English Another study found no connection between cruelty in video games and the real world. The state of world science: the United States and Europe ahead of everyone, but China is quickly catching up Rejuvenation of the body, slowing aging - how to measure the effectiveness of methods and / or drugs Work of consciousness: what are Gabor's spots? Visiting MSK-IX. Kurchatov data center LaMetric Time - smart desk clock for home and office Soviet HI-FI and its creators: 35АС-1, S-90, Kerno and the first Soviet HI-FI Drama Angosata The first answers on Russian claims about slowing down the iPhone How to cook IBM Model M "Wall": remember the legendary album Pink Floyd - this year it will be 39 years old Small-scale production of electronics in China, the personal experience of a layman New FlashForge Inventor vs. Dreamer The temperature and pressure of science fiction - part 1/3 Flashforge Hunter Photopolymer 3D Printer Review Pretty unusual achievements of domestic medicine What payment innovators can learn from monkeys What is mining, and why mine on video cards How to establish quality control of medical services: the experience of the DOC + team Nature asymmetry Enzyme medicine or how to get up quickly after injury History of participation in the Game Jam. Snowbox Ask Ethan: Can under-stars still become stars? ASUS ZenBook 13 Ultrabook Review Friday format: women in electronic music - Wendy Carlos and Susan Chani The lucky ones and losers in the bitcoin world: 7 stories from 2017 Media: US will stop funding the ISS in 2025 Temperature and pressure fiction, 2/3 486th from the Republic of China Stylization of music using neural networks The most anticipated scientific experiments of the next decade. Authorities intend to identify miners on electricity bills in Russia AI and unmanned vehicles - we invite you to talk USB hub Kingston Nucleum - turn the laptop "without ports" into a full-fledged working machine Pocket keyboard or meaningless but cute design Spark protection device UZIS-S1-40 Another 50 Bitcoin forks in 2018. Madness or reasonable trend Blue Origin is negotiating the construction of a launch pad for its extra-heavy New Armstrong PH Thinkpad T22, Windows 98 and Adequacy Inflation and the Big Bang: not an explosion, but an expansion Tesla is gradually increasing its Model 3 production. Temperature and pressure fiction, 3/3 Flexible discs - universal media that is back from the past 5 promising ICO for investment in 2018 Z-Wave LED controller with encoder. Z-Uno + MOSFET + Encoder Musical instruments that have not become mainstream - from modern to classic Hashflare Yield Review. My experience for 6 months Need data faster and a cleaner planet? Start developing asteroids Illusion level consensus Bloomberg: Telegram plans to raise more than $ 1 billion during the ICO The White House is interested in launching Falcon Heavy DIY controller LED panel on CPLD using BAM modulation The AI specialist claims that he was able to understand what language the Voynich manuscript is written in. AttnGAN neural network draws objects in parts, using the vector space of not only sentences, but also words Pyrolysis boiler in the home, or when the price of gas does not matter AudioFilkina diploma: blue tooth music is not a hype for the sake of, but good for The UN can complete a large-scale random experiment to reduce the rate of occurrence of global warming. Scientific analysis of the infrastructure of Bitcoin and Ethereum has shown a great centralization of networks. Intel warned Chinese suppliers about Meltdown and Specter vulnerabilities earlier than the US government Tesla's giant battery system made a million dollars in two days Wikipedia has studied the statistical distribution of user attention The time has come for great goals - an interview with Aubrey de Gray - chapter two "Let there be light": how did the backlighting of electronic devices evolve Ask Ethan: Can we save the Earth by moving away from the Sun? Another attempt of the second launch of the PH Electron is successful. Rodents eat soy wires of South Korean, Japanese and American cars Eminem goes IPO: what does it mean Van Gogh of the computer world: an image generation program "Bacteria" in the car: the smallest electro-optical modulator Fitness service revealed the locations of US secret objects. NASA's flight plans to Mars are somewhat controversial. Heading "Without socks." Gifts for men through the eyes of men Another neural network was taught to diagnose the problem by X-ray Features of the regulation of cryptocurrency, ICO and mining in Russia. Interview with Igor Matiukhin Why photo reporter 3D printer Theme Hospital was created as a satire on the American health care system. CES 2018: What do smart home developers offer? Vapor of electronic cigarettes will save 6.6 million lives of smokers in the United States, although it causes mutations in DNA Observation of dark matter annihilation signs Granite BZ-300-L - the elimination of flashing LED lamps Triumph and weekdays. How to install the spire on the skyscraper Lakhta Center. Part 2 Review of thermonuclear startups in the world A man trying to solve the problem of waste on Everest Windows 98SE - box, disk contents, installation (video and text review - optional) NASA explores the potential of blockchain in space Yongnuo YN300 LED Photolight with High CRI Visa left without the support of the owners of debit bitcoin cards My own game. Part 1 DJI introduced the folding drone Mavic Air Universal system for remote data collection from counters Tesla electric car in autopilot mode crashed into a fire truck Why is the number of qubits “crap”, and quantum communication is valid only at short distances Cyber Monday 2018 - what can be offered to the boom? Wozniak criticized Mask for high-pay; said he believes in nothing The ex-structure of the FSB has developed a domestic cryptographic coprocessor DJI Goggles Racing Edition Review Perfect WiFi to energy converter won't be particularly efficient Scientists have created an artificial synapse for the future "brain on a crystal" And yet it happened. Burn Falcon Heavy Ilon Musk and his flamethrower. Is it possible to own such in Russia? How AI inserts Nicolas Cage into movies and making porn with celebrities Why do we need sleep? Rocket Lab launched the Star of Humanity Robots, hype & rock`n`roll: about culture, music, automation and button accordions Scientists create a cheap device to detect bacteria in food Invisible optometrist. 5 microrobots inside our body to replace doctors SamsPcbGuide Part 1: Evaluation of the inductance of elements of the printed circuit board topology Hyde: how not to make stupid mistakes in written English Project Adrift "revived" space junk Chinese first cloned primates Almost lost, but saved spacecraft An overview of XYZprinting 3D printers with Formnext 2017 ADHD Eternal procrastinators, liars and sluts Researchers from Korea have developed contact lenses - blood glucose meter Suddenly completed geoengineering of the Earth’s atmosphere is more dangerous than climate change Color music for LED strip WS2812, Arduino and PC Sony Xperia XA1 Plus review: the middle of the frameless line Biodiversity provides not only beauty, but also the future of our world. New type of work: would you like to become a nurse for robots? In the same river, you can still enter twice Why are the most complex equations of physics so difficult? How to use a smartphone to improve health Russian Ecola Roulette New revisions of modules based on ESP8266 do not know how to write in SPI Flash Windows 10 for the first time overtook Windows 7 The history of creating a home cloud. Part 2. Creating a server - setting LAMP in Debian The results of a 4-year study of coral reefs: plastic kills corals Ask Ethan: How close are we to the Theory of Everything? HDD reliability backblaze report: statistics from 2013 to 2017 Mathematicians found the problem in the famous equations for describing liquids Cheating live in the accident "Ariane 5" Wheel lira, harp, kahon and musical saw are instruments that did not become mainstream It's time to get Google Reader back. Philips lamps from Pyaterochka: there is a nuance HiSilicon Kirin 970 Android SoC Review - Performance and Efficiency The story "Life is high" Triumph and weekdays. How to install the spire on the skyscraper Lakhta Center. Part 1 How Bezos solved an unexpected problem in advertising his smart speaker. Why is it important for schools to spend more time studying discrete mathematics? EDC device for the sysadmin: Linux in your pocket Superfluid Universe: dark matter as Bose-Einstein condensate Hot Big Bang and Inflation LED panel with WIFI Sonoff BN-SZ01 Heart attack and sepsis in 10 minutes Tesla will unite 50,000 poor households in South Australia into a virtual power plant of 250 MW One more ICO has disappeared, only five letters remain on its website. China will conduct training shooting from the electromagnetic gun on a naval ship Yandex Browser starts blocking annoying ads by default Comparative testing of 6 types of shoes for winter What was the first Unreal Editor References blockchain for the humanities Intel Titan Ridge - Thunderbolt in a new way IMEI registry to be introduced in Russia to block smartphones smuggled in from abroad Play the creator of all things Cloudflare has stopped servicing Sci-Hub domain names. Russian court forbade third-party companies to collect data from Vkontakte users Quantum-resistant blockchain Reflections on the beauty of planetary motion Fighting global warming requires technologies that we don’t have Nakraudfandili: the best projects for January 2018 IoT Samsung Academy project - we teach technologies of the “Internet of Things” How to build the process of learning English - from zero to intermediate level Three documentaries of interest to engineers HTML + JS client for Line video surveillance system How did human perception of space develop, and why do we need measurements Results of the study: piracy helps to improve the sales of works of many artists. Squeeze electricity Distr. Review of useful programs, late for 16 years Is blockchain personal security or personal danger? The history of creating a home cloud. Part 3. Creating a personal cloud - installing and configuring Nextcloud 8 rules of communication in a multilingual environment: instructions for employees of international companies UNICEF encourages gamers to mine the air for Syrian children What you need to know about children's eyes Dell Precision 5720 All-in-One Review: A Powerful All-in-One Console for Demanding Users What will change in the SSD and RAM in 2018 - new products Kingston and HyperX Witbox Go 3D Printer Review Voting for the reports at the 6th DIY-MAP in Mail.Ru Group (02/18/2018) Rating of electronic components search platforms 3D printing with metals on Formnext 2017 CoinDesk study: only 19% of investors took loans to buy cryptocurrency Ask Ethan: Isn't it silly to dream of terraforming Mars? Dane distributing instructions for Popcorn Time users went on trial As a malicious site generators phrases allowed to steal $ 4 million Mining tax: how it will work Scientists have created an "alien ocean" to test the qualities of an underwater robot Intel RealSense D400 - Digital Reality Cameras Data threatening to break physics Russians began selling their mining farms How Alaska Fights Digital Inequality Fair comparison of the camera phone and a SLR camera In RNIMU them. Pirogov developed a “glove” with a neural interface to restore the function of a paralyzed hand Musk explained why SpaceX is not afraid to launch a rocket with 27 engines Harley-Davidson will release an electric motorcycle NASA has learned how to dynamically eliminate picometer distortion from telescope optics Long-lived satellites "Human Uber": a person with a tablet on his face will be able to live for you How in reality the patch from the vulnerabilities of Meltdown and Specter affects the performance Chinese satellite used quantum cryptography for secure intercontinental video conferencing Anti-cancer "vaccine" destroys cancer in mice Interview. Call Center Revolution: Which Office Workers Will Robots Actually Replace Tesla successfully completed the maneuver and went to Mars ZX Spectrum do it yourself Biochemists argue about whether the end of the era of RNA does not come Large test thermocup. Personal experience and tests for yourself Ask Ethan: Are there defects in space-time tissue? Canadian quadcopter obeys the grimaces of the operator Computer enthusiast assembled 8-bit processor from scrap materials Manager of the President postponed the transition from Windows to Astra Linux MIT explained how habits are formed SpaceX rocket survived a fall into the water and did not even fall apart DNA through the eyes of a programmer Interface DALI and Arduino. Real surrealism Manage Internet relays from RouterOS Mikrotik via API Smominru botnet helped the attackers earn more than $ 3.6 million On Titan found a candidate for cellular membranes The smallest carrier rocket successfully put a satellite into orbit The sixth DIY-metap in Mail.Ru Group (02/18/2018) Researchers have suggested how to track a smartphone with GPS off My own game. Part 3 Almost happened flight to the moon Carpets and eyesight, how to wash, clean glasses and stroke a cat Why the Falcon 9FT is a masterpiece Story "The Ring of History" Burglars have implemented a miner’s script into thousands of sites, including UK and US government resources The government will limit the list of companies delivering goods from foreign online stores History stored in DNA The greatest adventure in human life: 7 stories of space tourists Psychedelic fiction (ch.3) Full HD to the masses! New line of budget Epson projectors - Epson EH-TW610 and Epson EH-TW650 HyperX Alloy Elite RGB - the perfect symbiosis of hardware and software On the vast expanses of radio: World Radio Day Ordinary wood made stronger than steel or titanium How to negotiate on Skype and telephone in English: instructions and useful phrases The Russians offered to throw off the lunar program for 21 000 rubles. per person Dissolute middle ages Life-giving bandage unremovable Intel showed smart glasses in which the image is broadcast on the retina How a smartphone can overhear, spy, and track Software Development for DSP TMS320F28 motor control [CASE] 3D printing in the light industry on the example of FullPower How dirt can save humanity from an infectious apocalypse [CASE] As we did the layout of the building Novo Nordisk Virus robots are programmed to block human blood vessels and kill cancer. Yandex biasedly composes its news tops, says a complaint sent to the FAS Dream Guitars: multigref monsters, strange hybrids and other re-created “bikes” Rostelecom wants to buy Sailfish OS, the Russian alternative to Android Deripaska will sell miners of Siberian electricity for a billion rubles What happened to the crypto market - the main reasons for the fall At the Olympics-2018 competitions in alpine skiing among robots The recent google translate AMP in email is a terrible idea. Chrome started blocking all ads, even AdSense, on “unscrupulous” sites Go! Falcon Heavy sent Tesla to Mars "Open Sesame" Or Intel RealSense and ResNet on guard of fruits TsNIIMash patented a “friend-foe” laser identification system for satellites Top 10 common mistakes you can make in English pronunciation Facebook started spamming the phone numbers listed for two-factor authentication Priority projects of mankind Review of the smartphone ASUS ZenFone 4 Pro How to organize a world-class eSports tournament and cope with force majeure REDMOND SkyGrill RGM-M810S: smart electric grill with oven function A hundred years to correctly name the fish Interview with Walter Levin. About physics, art, secrets of teaching and the main mysteries of the universe Safe Android for a child Be healthy! With the Internet of Things ... "Eight Beats": about sounds in old games Choosing a Home Cinema Projector Miner from New York was forced to turn off the equipment due to interference with the network T-Mobile Ask Ethan: Is the light always moving at the same speed? Pi-Sonos v2.0 or the evolution of Internet radio on the Raspberry Pi Weak physical activity associated with weak nerve tissue and the risk of dementia Dim light makes it dumber, and flickering with the desired frequency heals Alzheimer's Valery Lytvyn, CTO cyber • Fund, “Blockchain. Template Break is a popular introduction to blockchain technology and crypto economics. ” Enthusiast faces 15 months in prison for copying free Dell Restore CDs Parents should not spy on their children. “Sound in the Museum” - industrial design, modern art and creative experiments Broken for several years, Robonaut finally returns home Oracle stops shipping software to Russian oil companies How we set up a new production facility One day with Tesla Is it possible to give all mankind a decent quality of life and maintain it "Roscosmos" is ready to give the Russian part of the ISS under a private cosmodrome with nuclear tugs ChargePoint Annual Report Gadgets that are now allowed to import into Russia. On examples Shops without cash desks, cash and staff: how the future of trade works Radically new scheme to prevent catastrophic rising sea levels A new form of qubit control can increase the time of steady operation of a quantum computer. Information transfer faster than the speed of light. Building a telecommunication system What are some unusual musical instruments used in the dub of horror Accounting for programmers Who lives on our face Everything about cosplay: history, psychology, essence (+ photos) Epic race story to the world 01:59 The first crash involving multicopter Google teaches AI to write Wikipedia articles February 23 is close. The eternal question - what to give? How is the solar system moving New machine room in the legendary MMTS-9 Epson EH-TW5650 - new contrast records in the line of "popular" projectors Epson BlackBox is a source code generator (JAVA, C #, C) processing the binary protocol of your distributed application Three ways to learn phrasal verbs in English The book "The Great Space Journey" Doctors will soon be able to restore teeth Google's neural network determines gender, age, body mass index and blood pressure at the fundus Visa and cryptocurrency: the payment system creates problems for the cryptocurrency world Samsung Corporation began mass production of corporate SSDs of 30 TB Google sued due to defective Google Pixel smartphones Snapmaker Compact 3D MFP Review Gift Ideas for February 23 - Smart Geek Pens Observation of stars during the day or day astronomy Why some applications use not real progress scales Addons for man: empowerment How to step over Intermediate and bring English to Advanced We solve the shortage of addresses with the help of CGNAT Jeff Bezos began installing a 150-meter mechanical watch that will last 10,000 years. Spyware Cases (Part 1) Trump administration plans privatization of the ISS American segment after 2024 "Alien Ship" Oumuamua rotates randomly Hackers hacked Tesla instance on AWS and mine cryptocurrency there In the New Year - with the new "Factory". Briefly about updating the line of Epson printers and multifunction printers Physicists intend to classify all phases of matter. Company C7 wants to take in the ISS concession and launch nuclear-powered tugs How and why Bezos builds a clock for 10,000 years Imaging without lenses Did the USSR illuminate the landing on the moon? View from the back of the Earth Why you shouldn't be afraid of killer robots Ministry of Communications proposes to regulate ICO The water level in the oceans rises faster than the estimated figure. What is now known about supersymmetry in physics Another way to decompose a signal into a spectrum PocketBook 740 Review: The first little big reader. With two cores, color illumination and cloud service Interview with Vadim Zorin on skin rejuvenation The creators of the crypto miner Coinhive did not expect such a popularity of their development among intruders Particle announced three new Mesh-enabled boards Crypto Millionaires fund research to reverse the aging process The development of food rations for manned mission to the moon began in Russia Weekend reading: 5 books about music and musicians What to listen to in the background: 10 popular science podcasts about sound and work in the field of sound recording 4 cases of telemedicine from the United States, which is worth a closer look Doctors use machine learning to fight deadly infections Soviet HI-FI and its creators: a domestic dynostatic hybrid that appeared simultaneously with MartinLogan Another cryptostartap was dissolved in the air, collecting $ 4.8 million on ICO Toyota develops heat-resistant magnets with reduced neodymium content John Romero about the tile editor in which more than 30 games are created The owners of the rights to the old multiplayer games resist the attempts of enthusiasts to revive them The passage of Venus across the disk of the Sun and determining the distance between them Roscoscy determined that online dating in Android is cheaper than in iOS An amateur astronomer tested a new camera and accidentally photographed a supernova flash Write on Giktaymes, this is cool ESP data acquisition system. Part I. CO2 Will the electric car Mask return from space to Earth? Smart car makers want to monetize customer data 47% of parents are concerned that their child has a painful attachment to a smartphone 17 most unobvious iOS features that you might not have known Forgot to change the azimuth: the results of the investigation of the accident with "Ariane 5" Russia will launch glass reflector satellites into orbit Steve Papella's “magic” liquid: from NASA projects to liquid-cooled speakers We are saving in the rich or familiarity with the BMW i3 Save money and avoid fraud: where and how do people use face recognition in Russia New Xiaomi-2. This is the technevinegret Ask Ethan: what scientific experiments will open the door to the future for us? The Nokia phone from the Matrix will be brought back to life Oxygen ions can be a reliable indicator of life on exoplanets Consciousness without the inner “I” SpaceX - what we should build Falcon Heavy. And who needs all this Visualization of no-fly zones What AI can and cannot do for your business Experts predict that Amazon will become the leader in online advertising. Jupiter's Great Red Spot is changing and shrinking. More ultralight launch vehicles Thermal imager, molecular scanner and indestructible strength: unusual mobile phones Lighting plants with white LEDs - about efficiency and cost-effectiveness Shakey: how the first mobile robot was arranged New Mysterious XD Design Development Backpack Homemade dimmers for home automation systems Liquid cooling with Dell Precision T7910 graphics station Content delivery schemes on IPTV AMD Tech Day at the International Consumer Electronics Show: Roadmap, APU Ryzen, 12nm Zen + and 7nm Vega Some black holes blur the traveler's past, but reveal an infinite number of options for the future. How to search for supersymmetry at the Large Hadron Collider Unexpectedly simple and effective technique improves memorization. Apple already has 60 lawsuits on slowing down old iPhone models Do you know how to love? And hate? A few words about the dangers of love and the benefits of hate Polar H7 Freeze Treatment Why the brain of hawk tobacco is more efficiently trained than computer neural networks A trip through the city through the eyes of autopilot Guitars dreams p.2: console hybrids - geek-aesthetics and artistic noise generation (Sega, Nintendo, Atari, etc.) Several small robots cut furniture on a computer layout Lithium niobate - the possible future of optoelectronics? 2017 for Canon: the main results Yandeks.Kassa, Robokassa, and other payment aggregators: where to go to a startup or small business to work legally? Porsche presents blockchain solution for cars Telegram sells cryptocurrency at $ 1.33 per 1 gram, applications for less than $ 1 million are not considered The dark horse of music streaming from YouTube: a potential killer of Spotify or another stillborn project ... Polynomials and Splines Programmer's Guide ASUS Transformer Mini Transformer Review (T103HAF) Earnings cryptobirds, trading through a broker and HyperLedger Fabric: what was said at the blockchain conference in St. Petersburg PWD13F60 + STM32F4: 1 kW inverter in your pocket Review of PocketBook Cloud - a free cloud service for synchronizing books between readers, smartphones and computers First contact The launch of the James Webb Space Telescope will be postponed due to technical problems Mars InSight spreads its solar wings Intel Xeon D - additions to the family Scientists have built a family tree for 13 million people over a period of 300 years Liberated evolution Kingston DataTraveler Bolt - backup your vacation No opportunity to get new lungs? Worth trying refurbished "Non-artistic" musical reading: memoirs, essays and studies of music Soviet Maglev: the future that did not happen Test reliability robot SpotMini: an attempt to escape from a person The new achievement of scientists from Microsoft will create exabyte drives Since March 8, Habradevchek! Outstanding women in the world of computer technology We speak like Americans: features of the American pronunciation Top 5 Trends at Mobile World Congress 2018 Bigelow Aerospace is developing orbital stations that will replace the ISS 3D printing in shoe manufacturing What does every engineer need to know about 5G? Packing civilization in a box designed for space means choosing our heritage Scientific breakthrough: a combination of gravitational and electromagnetic waves Sound Power: Acoustic Levitation CERN will carry the antimatter on the truck for the annihilation experiment Nitride in your cage: like a cancer killer in an inert matrix hid The court banned American teen video games with violence Our whole reality is a process. The colony. Chapter 19: Peter Alcohol Abuse - the fastest way to dementia Samsung Gear VR: impressions after a month of use How to become a wizard (part 1) Apple is going to buy cobalt exclusively from mining companies Marine ecosystems able to adapt to global warming Emotional history of processors for the first computers from the 70s to the early 90s Telegram holds another ICO round Another device for a smart home A wave of equipment theft from a mining farm swept across Iceland What is educational robotics today? Manifesto of thingness An amateur astronomer tried a new camera and accidentally photographed a supernova SpaceX continues to work: the first two satellites of the global wireless Internet network and the hunt for fairing Sleepace Sleep Gadgets: Smart Lamp, Xiaomi Tracker and Headphone Mask Why is bitcoin difficult to call the Ponzi scheme The European robot rescue WALK-MAN has lost 31 kg and has become 40% stronger Apple devices have a lifespan of 4¼ Why are rockets fairing so expensive? 10 main programmer disappointments Hand-held LED-watch for teaching soldering SMD components Sony Xperia XA2 Ultra Review How to count the sound from a pack of chips, or what is a "visual microphone" DARPA opens the program "Biostas" Player Wanhao D9: Affordable 3D printer with large print area 10 phrasal verbs for the negotiations in English Development: New Generation Messenger. Part 1 Smart pen Neo SmartPen N2: what's new? ASUS VivoBook S15 Notebook Review Strange and high-speed world of racing on drones: continued The Kurchatov Institute developed microbial fuel cells. TRANSLATION: Why decentralization is important Cheap button phones today embedded world 2018 at the Nuremberg Exhibition Center Imaginary speech subjectively reduces the volume of the sound around a person Is public “biohacking” good or bad? The most difficult situations in ophthalmology (some tin) "Make me like an Apple." Worst Trends Mobile World Congress 2018 Robot TIAGo learned to bring 20 types of beer from the refrigerator RestOn Sleep Tracker - pulse, breathing, smart alarm and much more Robomobili will be able to ride around California in April Why does Google experiment with hypersonic shells and where does geothermal energy Chinese typewriter - anecdote, engineering masterpiece, symbol Designer lamp VILLY Ask Ethan: Where does the liquid water come from on the frozen planets? In 2018, it became possible to continuously monitor aircraft anywhere in the world. Development: New Generation Messenger (Part 2) US federal judge: retweets, repos? Get ready to be a copyright infringer Flippy's mechanical arm has learned to perfectly turn the chops Why are we still blind in the big data era? Useful fast food Professional stereo lithographic 3D printers DWS XFAB National Geographic Russia: money or principles ?. Alex's smart column laughs at random times, including in the middle of the night. As a gust of wind marked the beginning of one of the largest telecom constructions of the century The development of CAD, what do we get? Several interesting models of watches from the catalog Intuition Trainer (TIN-2) And they ate happily ever after: food today and tomorrow The reality of color is in the process of its perception. Earth's deep-sea microorganisms can live on Enceladus Three years Kingston on GT: remember the best moments Wikipedia has become a source of citations for scientific work, although scientists do not refer to it. Give gadgets, beautiful and different Dinosaur error What if memory fails China’s Tyangun-1 space station will fall to Earth next month Who are amateur shortwave hams "Up to 10 thousand": 50 audio reviews Hubble Space Telescope (article plus video) 15 phrasal verbs that will help you at work Biometric protection bypass methods Neural networks and language philosophy Windows will reserve 7 GB for system upgrades to avoid running out of hard disk space. How to make a switch? Players of Fallout 76 who will be found in the secret location of the developers will be banned This is Karma, baby, or why the attack on wireless networks, which was supposed to sink into oblivion, is still alive AR and VR technologies in education Organization of the work of a single programmer Mathematical Chaos Models IVR with voice recognition on Asterisk - fast, easy, free Magento 2: import products from external sources How did we develop the Librem 5 devkit completely on free software? How not to litter in java An introduction to Kubernetes for VMware users. Part 1. Theory GoDaddy customers are unhappy with JS injections from the hoster React Tutorial, Part 9: Component Properties Can the researchers of artificial intelligence trust him to check their work? The sound of silence: how many crazy gadgets are required to achieve an environment that is optimal for sleeping? Graphics Optimization. Interesting Concave Hull VDS server in Amsterdam for 150 rubles / month Synchronize Wi-Fi access points for collaboration How to connect Raspberry PI to Azure IoT: step-by-step instructions How to create a department of Data Science and not screw it up Digital events in Moscow from 14 to 20 January Snom D3 and D7 Expansion Module Overview Architectural solutions for mobile games. Part 3: View on jet propulsion Arbitration system for beginners, part 1 Artificial intelligence for everyone Apocalypse Mathematics: Game Theory and the Caribbean Nuclear Crisis Conference C ++ Russia 2019 How to deal with flaky tests in the opensource community Clean, mark: how we taught chatbot to distinguish between client questions Cowrie Hanipot Attack Analysis Roscosmos will still cooperate with OneWeb Security Week 03: 2019 - year of privacy How UEBA helps increase cybersecurity Update Update 4 for Veeam Cloud Connect Graphic editor GANpaint draws objects and demonstrates the capabilities of GAN. Oracle exists Reader Code Control over the space telescope "Spektr-R" could not be restored Design Science Dropbox Paper: how to stay alert Until the end of the free support of Windows 7, there was only a year left The pre-code or how the concepts “code word” and “digital confirmation code” by SMS are confused in the working system Where the texts come from: a short guide for those who want to save on content for SEO HP 3D Printer Overview on IMTS 2018 Mathematicians have proven polynomials will not help crack RSA The kubectl-debug plugin for debugging in Kubernetes pods PERDIX: an algorithm for the automatic design of DNA origami of different geometries The experience of creating the first robot at Arduino (robot "hunter") Intel Lakefield: Atom + Core Hybrid Processor in 3D We read comments on Habré with conveniences Kubernetes: build Docker images in a cluster Interview with Bukhanter Artyom Moscow. He hacked Steam and received the largest award in the history of Valve The project of the Ministry of Communications on the transfer of Internet traffic through Russian stations complicates the legalization of OneWeb in Russia 12 weird things that can happen after installing the npm package Imported duties will be imposed on import routers up to 20% OceanLotus: Southeast Asia watering hole attack Google has still not paid a fine of 500 thousand rubles for non-compliance with the instructions of Roskomnadzor "Under the hood" storage Huawei: proprietary technology, and what others do not Bloodsucking bosses in the context of biocenosis: why the self-governing team disintegrates if it is not centralized Intel Core i9-9990XE (14 cores to 5 GHz) will be sold only on a closed auction The history of one junior - how to start working and not be afraid of everything Configuring data transfer from the device to AWS IoT Core A mistake that taught me about business-oriented design. The story of one speedometer problem, or How Chromium drives memory The craftsman turned the Raspberry Pi into a computer mouse with a monitor and keyboard 5 simple rules for easy to read code GoPro factory moves to guard against the threat of higher import duties A landmark experiment has proven that quantum messaging is faster than classic On Pwn2Own offer Tesla Model 3 to the one who breaks the protection system of an electric vehicle In the biocontainer the first plants sprouted on the moon PADS Professional - Quick Start Agile analysis. Myths and Reality Slack plans to go public to bypass the traditional IPO mechanism Freedom of flying at your fingertips with DJI Smart Controller Browser physics simulation How does the Ivideon video surveillance system: a review of the mobile application Testers voyeurism: how to spy on people and why? Dungeon generator based on graph nodes US court decision: the authorities have no right to force a person to unlock the phone with his finger or face I lost faith in the development, burned out, but the cult of the instrument saved me New torrents stopped appearing on The Pirate Bay Biquaternions Spring JPA repositories in CUBA How scoring works in the car sharing industry. Part 2. Determine the aggressive driver in 5 seconds We write our programming language, part 4: Representation of structures and classes, generation of allocators Wireshark Guide and Cheat Sheet Developing a team to request data from the database How to take control of network infrastructure. Part Three Network security Continuation Telepathy strategy Haskell applicative parsers We use data science to determine the life cycle of the client Kubernetes Authentication with GitHub OAuth and Dex YOLO and other loose methodologies The new brain of Professor Lawrence Modern automotive industry - 02. Very tezisno about OS "Bloodsucker bosses" out of context or why they always fail How to connect Yandex Cashier and succeed in conversion Getting a job in Germany will be easier * Ethereum "Constantinople" update postponed due to a potential vulnerability found at the last moment Monorepositions: please do not (part 2) Extreme Scaling in Alibaba JDK We collect a full deck 35% of the audience of the Runet do not use a computer for the Internet at all A mobile application is being created in Russia to register an accident Checking a CDK project with the IntelliJ IDEA static analyzer Implementing honeypot on Cisco routers A challenge from a foreign company or how I failed an interview Hacking Amazon Echo and Google Home to protect privacy Control, change, delete: top 10 reports DotNext 2018 Moscow explicit in details Ideas from the table: virtual vinyl Top 9 Security Practices at Kubernetes Experience of real import substitution using Russian storage AERODISK Zimbra Collaboration Suite and Anti Phishing Machine Learning for Vertica Rostelecom may become a monopolist in the data center market How Ivan metrics DevOps did. Object of influence Neural network speech synthesis using the Tacotron 2 architecture, or “Get alignment or die tryin '” Japanese robo-hotel "fired" half of their robots because of the problems they create How intelligence cards help IT-projects New network automation features in Red Hat Ansible Many properties or object properties: selection criteria Compilation @pythonetc, December 2018 Repeated decentralization of the web. This time forever PVS-Studio 7.00 Making a Game Boy Game The study of concepts through sensorimotor interaction DuckDuckGo switched to Apple Maps How does Vnukovo airport work Separate logging level for each request An introduction to robust optimization [... and a small shopping list that I forgot ...] Fibaro Home Center 2 and thermostat for floor heating HeatIt. How to raise the temperature Do Docker, microservices and reactive programming always needed? Developing a team to request data from the database - part 2 We study Adversarial Tactics, Techniques & Common Knowledge (ATT @ CK). Part 7 Digest news from the world of PostgreSQL. Issue number 14 US military neglecting cyber security issues [Interesting from abroad] How do we stop technological dependence? Why does a senior developer teach students Liveprof will show when and why the performance of your PHP application has changed. Public key infrastructure. X509 v.3 Root Certificate Chain Overview of the EZ-Robot Roli Rover all-terrain robot bobaos.pub - KNX TP / UART, Raspberry Pi and Redis A quick start in 3D printing: budget printers for beginners or technology to the masses Antiquities: Ten Years of Laptop Evolution on the ThinkPad X301 Case Study We do UITableView. For beginners Benefits of analyzing level 7 applications in firewalls. Part 1. Basics Demis Hassabis - the great intellect that created the great intellect Can I use functional programming in my own language? Water Failover balancing of VoIP traffic. Load switching between data centers at peak-time How to become a game developer if you are a realtor Numerical modeling - the story of one project FAS Announces Windows Monopoly in Russia Photo tour of the new Facebook office in Boston Amazon Introduces AWS Backup for Backup Migration from Mongo to Postgres: The Guardian newspaper experience The largest dump in history: 2.7 billion accounts, of which 773 million are unique Imitation cannot be a product development strategy. Small creatures, great deeds: the role of leaf cutters in the greenhouse effect of neotropics We suspend the execution of the application if the connection to the network is lost. Why do we support sports programming Graphomania's confession PVS-Studio for Java CERN plans to build a new accelerator with a tunnel length of 100 km Roscosmos called the possible reasons for the loss of communication with the orbital observatory "Spectr-R" One head is good, but two is better, or pair programming in action Invisible deployable monolithic application in production on AWS. Personal experience All moon plants died Overview 27 ”IPS monitor Acer HA270bid: for self-improvement Remote and control, freedom and government structures. Conversation with Staply 7 directions of Linux development in 2019 JavaScript: questions and answers We create effect of distribution of color in Unity Selection of technologies, architecture and design in software projects - without bills 2. Check Point Log Analysis: SmartEvent Electron: develop desktop applications using HTML, CSS and JavaScript Legislative experiment with the introduction of digital innovation Conference DEFCON 20. Capture in 60 seconds: from guest account to Windows domain administrator. Part 1 Conference DEFCON 20. Capture in 60 seconds: from guest account to Windows domain administrator. Part 2 Cloud for insurers Mastercard prohibits companies from automatically debiting money after the end of the free test period (updated) I made a bot that communicates with recruiters for me, and I liked it Advanced Three.js: shader materials and post processing Where to find DNS settings in MacOS What happens in the audio podcast market Motorola plans to present an incarnation of Razr v3 We are looking for speakers at the 10th DIY MITAP February 17, 2019 Replacing the disc while maintaining the correct numbering in CEPH Software AG: not only ARIS How to render a frame of Rise of the Tomb Raider Diapers by subscription or How to sell more to the same customers How to create AI racist without much effort Core Data in detail How do we find problem releases using Graphite and Moira. Experience Yandex. Money Creating story for Instagram from PHP Haiku β1 - let's make / b / OS great again Do not use online leak checking services. Contrary to instructions Programming experience on Unix * Ministry of Communications has approved a bill to isolate the RuNet Network debugging with eBPF (RHEL 8 Beta) Ctrl-Alt-Del: learn to love Legacy code How to simplify the deployment of cloud applications - presented a new open specification Difficulties in the operation of the security alarm Penguin, virtualization and $ 23 billion: how and why cloud technologies have forever changed the IT world Marketplace will answer for everything Developing a team to request data from the database - part 3 Virtual reality distance education program Thanks to the robot, scientists learned how to go one of the first inhabitants of land Obituary to the death of Chromecast Audio or why Google killed black disks Transferring 30,000 lines of code from Flow to TypeScript Work in a German company - how to submit a resume and not get a rejection? Happy 18th Birthday, Wikipedia; celebrate the age of good project Cryptographic protocols for electronic voting How does ProGuard work Own video platform or how to take a lot of computing resources. Part 1 Exorcism programmatic methods Skolkovo Cybersecurity Challenge 2019 Cyber Security Project Competition Intel: cut-down processors at the same price The price of personal security for directors of the largest IT companies per year Twelve Mistakes in Agile Manifesto Runet Management Act - implementation of regulations and areas of responsibility JS-battle: how I wrote my eval () MegaSlorm in Moscow in early June: first announcement and discounts Tips for a functional customer. Press Δ to read Backend in VueJS single-file components Farewell to the Chevy Volt: stories and legends about a charged hybrid One giant step for a chess machine Copyright nastig and choreography: the creators of Fortnite sued because of the dance pa game characters Cargo module "Zarya": 20 years in orbit The developers of "Angara" fear that rocket engines may destroy the rocket at the start We write an operating system on Rust. Paging memory organization How CSS specificity works in a browser Brian Krebs: a database of megapatch accounts containing hundreds of millions of records, 2-3 years Tesla will reduce the number of full-time employees worldwide by 7% How Singapore works with innovation: from government regulation to nightclubs What to prepare for in 2019: programming trends An integrated approach to visualizing security events and measuring its effectiveness Breeding Study: Most users don’t understand how Facebook handles their data Python is becoming the world's most popular programming language. Improving Q-Learning agent trading stocks, by adding recurrence and rewards Microservices. Unification and why it is so important. Part 1 - Configuration How we build a system for processing, storing and analyzing data in SIBUR Just about the internal and external settings for the application in Unity3D How I create VKontakte recommendation service Redistribution of windows between monitors after waking from sleep Ticket to Ride.Europe - modest steps in the arithmetic of the game Synthetic symbols and modules (WinDbg / DbgEng) Translucent to Android and adjustResize Combining projects in different data centers 3 winning monetization strategies for the application in 2019 MPS 2018.3: generation plans, improvements in the assembly and packaging language and in the editor's language, updated interface Developing a team to request data from the database - part 4, completing Automation for self-employed: how to integrate the tax with the IT project The future of retail: the main digital trends based on NRF Retail's Big Show 2019 February 1, 2019 your site may stop working Is it possible to count statistics with a small amount of data? How to roll up updates in production automatically Reverse Engineering Fantastic Dizzy How to DDoSit the whole country Do not create your own PS (DSL) to extend the functionality of the application. Anniversary Android 10 (Q). What is known now? JPEG from the world of 3D. What is glTF? IT giant leaves chip market for data centers - tell you what it means for the industry [Ask - answer] about intellectual property and data protection My Pascal compiler and Polish modern art How to generate binaural sound on a mono channel audio track - video will help How many ways can factorial be written on Scheme? Anti-spoofing: how do facial recognition systems resist scammers? The story of how we chose the scales to automate the cash places What does IoT consist of Trends of gamedev 2019 IMHO. Decentralization? Work begins with testing Fake Door as part of Customer Development Personal experience: Five difficulties in starting a business in the USA There is an opinion: IPv6 failed - who and why thinks so Prolog Diagnostic Medical Expert System Creating habit-forming products Users report the loss of bitcoins as a result of the ingenious hacking of Electrum wallets ML.NET tutorial - the first application in 10 minutes Hall of Fame Consumer Electronics: Stories of the Best Gadgets of the Last 50 Years, Part 5 Simple time use forecasting practices Forecasting again, part 2 Own research, what can open source tell us? We launch our neural network detector on the Raspberry Pi using the Neural Compute Stick and OpenVINO How to worsen performance, improving it Developing a hexapod from scratch (part 3) - Math Analysis of trends in Russian YouTube for 2018 Q2VKPT: Completely rewritten Quake II with realistic lighting Isomorphism to the rescue The attackers attacked Russian banks, sending messages to thousands of their employees Couchbase in telecom Creating your own jsfiddle part 1 The digest of interesting materials for the mobile developer # 282 (January 14 - 20) Cellular operators of Russia earn on the clouds The Law “On Communication” and Vulnerability in Messengers The method of hijacking accounts "wholesale" through access to the services of a cellular operator From comfort zone to top developers defi.js - reactive library based on Object.defineProperty The pitfalls of developing Google Play Instant Thimble (Mozilla) Moves to Glitch How we monitored Black Hat Europe 2018 Deploy Office 2019 in a corporate environment (for IT professionals) 256 lines of bare C ++: we write a ray tracer from scratch in a few hours Conference DEFCON 19. Anonymous and we. Part 1 Conference DEFCON 19. Anonymous and we. Part 2 "Energomash" refutes the presence of a structural defect in the engines "Angara" Professional deformation admin DIY project technique. Part two Communication widget from 3CX for your Wordpress site Notes phytochemist. Potatoes ("Bulba"). Part One, or the Hard Way to Our Table Natural wear of the hard disk heads. Detection and evaluation Space challenges, cancellations and imminent hazards In the United States are going to modernize obsolete nuclear power plants, extending their lives TDD Development Cost Estimate The new decree of the President of the United States significantly limits the work in the country of Chinese IT-companies Switch to Boost-1.65.1 and bugs that surfaced Benefits of analyzing level 7 applications in firewalls. Part 2. Security Understanding convolutional neural networks through visualizations in PyTorch The path from gloss to neuroscience: a thematic podcast about a career in media and content marketing Veeam solution for backup and recovery of virtual machines on the Nutanix AHV platform. Part 2 The digest of fresh materials from the world of the frontend for the last week No. 348 (January 14 - 20, 2019) NSA announced the release of an internal tool for reverse engineering Common mistakes when writing unit tests. Yandex lecture To drive development faster, you need to slow down. Rust 1.32 release The IT development plan according to the Ministry of Communications: digital sovereignty, blockchain in housing and utilities, software for "changed reality" Esperanto, Elvish and Klingon Dell and Alienware at CES 2019: A Guide to All Major New Products Third Generation AMD Ryzen Matisse: Eight-Core Zen 2 with PCIe 4.0 for Desktop How to recognize fake Agile projects Implement static analysis in the process, but do not look for bugs with it Roscosmos will form a detachment of women-cosmonauts Soon PGConf.Russia 2019 New Year's dances around the FC-adapter or a tale about how far the causes of the problem are far from the symptoms BERT is a state-of-the-art language model for 104 languages. BERT launching tutorial locally and on Google Colab We master async / await with a real example Using Babel and Webpack to set up a React project from scratch The story of how not to design API React tutorial, part 10: workshop on working with component properties and styling React tutorial, part 11: dynamic markup generation and the map array method Creeping IT apocalypse. New cloud services will leave some engineers out of work docker-pretty-ps - finally convenient for reading “docker ps” FunTech ML-meetup Overcoming the threshold of 32 KB for data in the ROM of AVR microcontrollers Roskomnadzor initiated administrative cases against Twitter and Facebook 6 ways to hide data in the Android application Tips for creating custom workflows in GitLab CI CRM trends 2019: fun to read, dangerous to believe Startup Growth Problems - Monitoring VShard - horizontal scaling in Tarantool Making Game Boy Game Part 2 PAS2JS Transporter from Pascal to JavaScript: Delphi incompatibilities and workarounds Optimizing Prometheus 2.6.0 startup times with pprof Heroes of two-factor authentication, or how to "walk in other people's shoes" WebRTC - even easier (EasyRTC) The transfer of the Internet of things to the Russian equipment has been postponed Japanese nuclear repository in Primorye or the place of dismantlement of nuclear submarines of the Pacific Fleet Guix - the most advanced operating system Heroes of two-factor authentication, part two 10 software testing trends worth paying attention to in 2019 The next step in airport security X-ray recognition: precision = 0.84, recall = 0.96. Do we need more doctors? Future data center infrastructures Startups at CES 2019: Part One For the sake of money: search and exploit vulnerabilities in mobile payment terminals Digital events in Moscow from January 21 to 27 On the issue of shifts, signs and speed MK Libratus strategic poker bot adapted for military simulators Popular open source - part one: 3 tools for working with data “Rostelecom. DataTalks ”- a course of free lectures on data engineering and data management Website optimization for GooglePage Speed (all features are taken into account after its update) Part 1 Daimler-BMW-plan. Naturally, not without Tesla Why do we need purchases, and what does it look like from an IT point of view Behaviors - a state machine without a headache Do not buy 5G smartphones - at least in the near future KeePass password check integration with leakage database Artificial intelligence - “Doomsday” or “golden age of universal prosperity” Security Week 04: what to do with passwords Microsoft stops supporting Windows 10 Mobile Linux API. Managing File I / O Buffering in the Kernel Camera, motor, Big Data: how film studios are looking for new films using AI Zimbra and Zextras Suite are fully compatible with the operating systems STC IT DEW Samples and errors when choosing HTTP Reverse Proxy Liquibase and Maven The final course in Python specialization from Mail.ru Group Chip protection against reverse engineering and unauthorized entry How to teach people to use git Correct ASP.NET Core Do YML programmers dream about ansible testing? Wanhao Duplicator 10 3D Printer Review Nlp The basics. Techniques. Self development. Part 1 Echoes of the past: Jung's experience at the heart of the new method of X-ray spectroscopy Multiple pitfalls of static typing in Python What is wrong with reinforcement learning (Reinforcement Learning)? Noise Security Bit 0x22 (Fault Injection attacks, 35С3 and Wallet.fail) Roskomnadzor renewed attempts to block Telegram Google in France was fined € 50 million in GDPR for misuse of personal data Automation of infrastructure of one smart office: how it looks NGINX Installation Instructions ModSecurity Universal "whistles": an overview of the Snom A230 and A210 USB dongles Translation of the Stream API manual by Benjamin Winterberg In Russia, we started testing the domestic neurointerface "Neurochat" How to defeat the dragon: rewrite your program on Golang Viewers cannot distinguish the native 4K picture from interpolation. The book "Python. Express course. 3rd ed. " Learning is not to be missed: Does an IT specialist need a university? New Intel 9th generation processors: Core minus GPU Zimbra Collaboration Suite and Zextras Suite are fully compatible with the domestic RED OS .RU domain zone shrank by 9%, .РФ - by 12% The effect of delay and pin lengths of the chip and software on the calculation of the total length / delay of conductors Gomoku's winning strategy - 35 moves Javathon to Student Day RKN unblocked 2.7 million IP addresses Survey Data Science Tools 2019 We weaken nuts in Habr's rules Google may block its news service in Europe How to speed up work with APIs in the R language using parallel computing, using the Yandex.Direct API as an example LiveJournal has been updated: a content categorization system with AI elements has been introduced Media: Hackers broke into the database of the US Securities Commission and earned millions on insider trading Promotion of a startup abroad: how to reach hundreds of thousands of English-speaking readers with the help of Medium Security of machine learning algorithms. Python attacks We are pumping Atlassian Service Desk - the announcement of the mitap and the live broadcast UDB. What is it? Part 4. Datapath ALU February 6, Moscow, DI Telegraph - Big QIWI Kitchen about product design Reverse engineering rendering "The Witcher 3" New champion from Lego, meet: Lego Boost Introscope: well, very lazy unit testing IT in .it zone Most of the texts on the Internet are written by madmen. Nanomaterials are changing our world, and we still do not have procedures for testing them for safety. DMA: Myths and Reality Open webinar: “SSH / NC / Socat: tips & tricks” AWS, MongoDB and the economic realities of open source AI and 2048. Part 1: Monte-Carlo Method Korean Office Chair: Feelings and Impressions of Harachair Miracle A simple way to add multiple languages to the site Reports from DevFest SPB 2018 QtCreator and its use as IDE for Rust The evolution of automotive engine development since the early 90s What Bitfury Does: A Digest About Our Developments Boring Company Ilona Mask is ready to assist in the construction of a giant European accelerator By inviting an experienced developer, you do not buy, but sell Mathematical model of the Dobbl game How I monetized the design. 15 insights on creating a digital product that is sold Fragile MacBook Pro display cable: another trap into which Apple engineers have driven themselves What is 8D audio - discussing the new trend Simulator Exact copy More positive Fiction of the future Three percent Devops # 10yearschallenge for programmers Meteor-e combat mission Facebook suggests using space lasers for global communication. IBM MQ and JMeter: First Contact App for iOS and Android on Kotlin + Flutter UI Severe Siberian JVM: great interview about Excelsior JET Nikolay Durov finished development of the Telegram Open Network platform by 90% During the eclipse a meteorite fell on the moon Cloud check-list, or how the customer assessed us Global Game Jam 2019 (announcement) How we tested drag & drop in HTML5 Backblaze has published statistics on HDD reliability for 2018 "Yandex" began selling its own onboard computers Debian still refuses to use HTTPS AccelStor - your own look at the work of All Flash We invite you to the presentation of the e-marketing marketing training course on February 12 Android Q will help to rigidly “tie” a mobile phone to a telecom operator Molecule - Testing Ansible Roles Proposed changes to Chromium will disrupt uBlock Origin Can money do everything? Usability audit of the site for three million Augmented Reality of Mr. Senior Consultant (story) Kelvin Point Shadow Bitcoin, as a currency, will lead to an economic crisis Such a different online advertising. Three axes vs. AI, Ad Tech and DOOH Psto good Begin to study microcontrollers on the example of STM32F030f4p6 ESET: Analyzing New Zebrocy Components Orange Pi 3 is released - a full-fledged mini-pc for $ 30 on Linux How to integrate Zimbra Collaboration Suite with Active Directory Google teaches users to recognize phishing e-mail FPGA mitap in St. Petersburg How we made a mobile app that doesn't need a designer. SDL 2.0 Lesson Cycle: Lesson 3 - SDL Extensions Libraries Validation of addresses in the memory on the Cortex-M0 / M3 / M4 / M7 Unique project of the CATIA DESIGN team: Bleu concept car Windows Phone 8.1: Post development nostalgia. The history of one application How does river water get potable? Professional burnout in IT (results of the research "My Circle") The number of pirate sites in Russia has increased dramatically We deploy a virtual machine with Windows with a virtual video card forwarded with QEMU and Intel GVT-g Remilicht table lamps with Sunlike LEDs Boeing conducted successful tests of unmanned aerotaxi Simple do-it-yourself logistics An introduction to Kubernetes for VMware users. Part 2. Practice Zoo professions related to the audio industry I try .NET Core + Kubernetes + appmetrics + prometheus + grafana + jobs + health checks The introduction of a fake news detector in the mobile version of the Microsoft Edge browser reveals questionable sources Why the traditional model of retail stores is already dead Why don't people use formal methods? About one guy How to buy potatoes if you are color blind Unobvious skills required by the product manager SDL 2.0 Lesson Cycle: Lesson 4 - Event Handling Gradient borders in CSS Implementing a hot boot of C ++ code in Linux and macOS: digging deeper Italian Enigma: OMI encryption machines Institute for Internet Development called sites that can be disconnected in RuNet from February 1 Seamless (almost) migration between PostgreSQL major releases using logical replication Media Sphere Development Index 2018: TV stagnation, growing confidence in informal media The state engaged BigData Bloody kiss: vasorelaxation spasor relaxation properties of vampire bats On the question of multiplication, square root, import substitution, and Milander devleads - let's talk about professional burnout Two percent "cat" or who photographed Master Yoda? What will happen on February 1st? From Penza to Berlin: History of moving test automator Bing blocked in China How to choose a video surveillance platform: Cloud vs. DVR / NVR / VMS A game (not) for fools. Writing AI for the Fool (Part 1) Boost GitHub Productivity: Tips for Newbies and More Car in the era of multi-functionality. What transformations are possible? Weaken the nuts, part 2: voting time for publications and other changes What happened to SSD in 2018 Product Compatibility Management Download controllers without using the Arduino IDE console Control over Tele2 will cost Rostelecom 240 billion rubles How to hack a factory: radio control systems as a weak link in modern production MOSDROID # 15 Phosphorus Three simple steps to reduce Docker images Facebook users rent out their accounts, get money and free laptops Curious perversions from the IT world - 2 What is ARCore? All you need to know Everyone scolds samopisnye test frameworks. And we are happy Theory of salutes. Fantasy on a cosmological theme Ministry of Labor and Rostelecom differ in assessing the number of officials who will receive smartphones on the domestic OS Sailfish Interviewing - Interviewer's View Amazon knows everything about you "Secrets" DPAPI. Look at the donkey Why does CarPrice run artificial intelligence? Cloud spending for the first time exceeded traditional infrastructure costs - what does it mean How I taught the robot to run YouTube videos The seL4 microkernel. Formal verification of programs in the real world 802.1x, EX2200, NPS and all-all-all ... Introduction to Spring Boot with Spring Data Mongo Where more than 20 million transport cards in Russia are vulnerable: disassemble and develop MIFARE Classic Capacity Management: Looking for the Perfect Balance About entities, DTO, ORM and Lazy Load Want eternal LEDs? Uncover soldering irons and files. Or homemade home lighting Are zerglings dreaming of artificial intelligence? Students, perennial students and people eager for new knowledge For those who know with ears: podcasts for developers GitLab 11.7 comes with Releases, Multi-level Child Epics and the NPM registry Audio technology: how pieces of plastic are moved using ultrasound and why it is needed Happy student programmer Technical support 3CX responds: configure the router for the PBX VoIP server A bucket of tar in a barrel of honey, or On the potential of culture shock for the winding up tractor Apache Kafka and RabbitMQ: Semantics and Message Delivery Guarantee January 28 in Russia, the system will earn quick payments without commission (by phone number) Huawei can buy Russian company "Vokord" Younger: review of IP phones Snom D315 and D305 Mandatory registration by IMEI is proposed to be paid. 32 GB fake stick example Bing lock in China called a technical error TypeScript Price Byte-machine for the fort (and not only) in Indian (Part 4) Retropie in the Dreamcast A few simple words about missile defense Moving from office to the remote: share experiences and life hacking Optimize game performance with Unity sound import options Ok Yandex! Where are our “Reach Goals”? What we should build a road. Part 1 4 visual novels for learning English Ask Ethan: If the light shrinks and expands with space, how can we detect gravitational waves? How I successfully completed six interviews in Silicon Valley AlphaStar - a new artificial intelligence system for StarCraft II from DeepMind (full translation) The key to the clouds: how to make your application Cloud-Native Conference Lua in Moscow 2019 About variables in programming About important “invisible" things - trust, culture and values I’ll stop throwing it in the trash Tiny components: what can go wrong? We use the principle of sole responsibility CVE-2019-6111 and other scp vulnerabilities What happens when you send SMS What are pure functions in javascript? We are looking for errors in the source code of the Amazon Web Services SDK for .NET Beetles are attacking “My light is a mirror! - say, yes, show my dual ... ": design one good framework and get the second one as a gift The colony. Chapter 22: Final Decision Create an easy chess AI: 5 simple steps Volume rendering in WebGL Straight line with TM. v5.0. Important survey inside Robotic industry is finally becoming more realistic. How Retentioneering is Implemented in the App in the Air The best of the world of Angular for the week - Digest number 1 (January 18 - January 25) The AlphaStar neural network beat the StarCraft II professionals with a score of 10−1 How to manage team conflicts We make a rating of cities in Russia for the quality of roads What is the difference between e-book displays and smartphones and tablets? Linux machine in a Windows AD domain using sssd and krb5 Not only uBlock Origin, but also other extensions will suffer from new APIs in Chromium Weekend Reading: 10 Vinyl Materials - From Production to Home Listening and Care Excursion to the production company Promobot. Interview with CTO Startups at CES 2019: Part Two. Strange and magical gadgets Systemd found three vulnerabilities - we figure out what's wrong Translucent background Irrational Game chat bot Guess the Word - a few observations and questions about the development Educational program for electrical injuries: from burns and cataracts to fractures and atrial fibrillation Why building a company knowledge base based on mediawiki is a good idea B \ y Tesla Model S 85 in the service of the police department of the city of Fremont, California, USA (where the Tesla plant) YouTube will leave misinformation in the search results, but will no longer recommend it. WhatsApp, Facebook Messenger, Instagram backend will merge and add end-to-end encryption Conference DEFCON 17. My failures. Part 1 Conference DEFCON 17. My failures. Part 2 How to remember a JavaScript tutorial for 5 days, or the “Palace of Memory” in the programmer’s daily life Review Vue.js 2.6 Mathematical Fundamentals Auto Layout Create a voice application on the example of Google Assistant As I eradicated the cause of stuttering and frame skipping in all games, and also accidentally lowered the temperature by 15 degrees OTRS: LDAP Authentication, Authorization, and Synchronization (FreeIPA, AD) How to save gaming system from home PC with virtualization tools opencv4arts: Draw my city, Vincent We profile Unity project with Android Studio Wave function collapse: an algorithm inspired by quantum mechanics [longrid] 20 years programmer career in a big small town The IT giant will take up silicon photonics - how will this affect the network equipment market Architectural pattern "Iterator" ("Iterator") in the universe "Swift" Half a year without a CEO and a decrease in iPhone sales: why Intel shares are falling 42 advanced Google search operators (full list) How cloud technologies change how we treat Getting started with the Azure Machine Learning service OpenSceneGraph: Texture Basics The performance of the trading platform on a simple example Tale of how to study computer science Microsoft's main announcements from the BETT conference Wireless Router DIY Publishing an application to Microsoft Store: some changes for the year "What is the answer point?" NEvizator's REVIEW. Atmotube and soldering If the windows open, it means - someone needs it. Useful and non-obvious things for a 3D printer: small things for a 3D printer A selection of the best gifts for the geek and enthusiastic person on February 23 Cheap and affordable photopolymer 3D printers An elephant in a china shop: 3D printers with a huge print field Guide: Thymeleaf + Spring. Part 3 The government does not support the idea of paid registration of devices in cellular networks Recovering data from under the compound Damage to the submarine cable left the whole country without the Internet Methods for recognizing 3D objects for unmanned vehicles. Yandex report Universities and Corporate Accelerators as a lever for launching a B2B startup in the USA My selection of Youtube on DIY High Algorithm - Biased Synopsis Studying go: we write p2p messenger with through enciphering OpenSceneGraph: Basic Programming Techniques FAS has developed a concept for mandatory pre-installation of Russian applications on smartphones Parsing the Files.walkFileTree () utility; The digest of interesting materials for the mobile # 283 developer (January 21 - 27) WIPO Translate Patent Translation Service - my experiences Analysis of the problem with the interview in Google: synonymous queries Excellent knowledge of the school program as an indicator of not the highest intelligence Refactoring does not happen much Limiting local user rights in Linux to the minimum Space Station Roskomnadzor Draw a cartoon explosion for 180 lines of naked C ++ Three relatively fair ways to create a Flutter project. Fight for quality solutions on Erlang / Elixir Cosmic Consequences of the American Shatdaun OpenSceneGraph: Procedural animation of geometry and state attributes Serialization of Kotlin using Kotlinx.Serialization How we solved the memory problem in PostgreSQL without adding a byte Review of the MakeX M-One Pro 70 DLP Printer Setting up IPTV from Rostelecom on MikroTik routers How we automated the launch of Selenium tests via Moon and OpenShift Notes phytochemist. Potatoes. Part two. The story about potato fat or "Day of the Syroyid" Haxe: The Big Secret of Cross-Platform Development Digital events in Moscow from January 28 to February 3 New voice applications on C # in 3CX v16 SpaceX and NASA are getting closer to sending a manned spacecraft PHP Digest number 148 (January 14 - 28, 2019) The digest of fresh materials from the world of the frontend for the last week №349 (January 21 - 27, 2019) Interesting statistics 100,000 profiles with Stack Overflow for 2018 (and habrapros) Configuring VSCODE for ARM development using the example of the stm32f429i-disco debug board OpenSceneGraph: Manage Windows and Display Modes January 28: International Day of Personal Data Protection KnowledgeConf: It's time to share knowledge Here live dragons: a matrix of competencies as a tool of the Timblid Gitpab Nice to meet you Tales from FRIA: Russians can earn up to 5,000 rubles a month on the sale of their personal data Anesthesia in modern oncology Ilon Musk explained why Starship will be stainless steel Conference DEFCON 19. Break open MMORPG for fun and profit. Part 1 Conference DEFCON 19. Break open MMORPG for fun and profit. Part 2 Gemini got "mysterious" results by checking 5 ancestral search services for DNA Fast and reliable data backup to the cloud 2 AlphaStar superhuman speed implemented as a patch for simulation training errors? ScrumBut in the analytics team: before takeoff Innovate Cloud Technology: Disaster Protection Cloud Can I use Redux on the server? EcmaScript 10 - JavaScript This Year Perf and flamegraphs Corporate reality Xcode 10.2, macOS Mojave 10.14.4, iOS 12.1 and other beta versions MPLS is everywhere. How is the network infrastructure of Yandex.Oblaka We teach the computer to distinguish sounds: acquaintance with the DCASE competition and assembly of the audio classifier in 30 minutes 50 shades of security Drupal Microsoft cut WMP functionality in Windows 7, leaving it the same in Windows 8 and 10 Universal expansion 1C for Google Spreadsheets and Documents - take and use How we migrated the database from Redis and Riak KV to PostgreSQL. Part 1: the process Open webinar "Order of execution of a SELECT query and query plan in MS SQL Server" Reliable programming in the context of languages - nubobzor. Part 1 Open source: kodoyumor, kodotryuki, NOT codebred Two stories about programming events in Yekaterinburg Under the hood of Screeps - virtualization in the MMO sandbox for programmers Machine learning technologies speed up the process of patient adaptation to bionic prostheses Donkey Kong's Secret History: From Arcade Machines to NES bobaoskit - accessories, dnssd and websocket Who is most effective in distributing printed circuit boards? The Story of Thorn Additional lectures of the course "Design of high-loaded systems" (autumn 2018) in Technopolis Security Week 05: Printers, Cameras, 7zip and Ethics Issues How Resident Evil 2 fell apart, but was able to become the biggest hit of Capcom Shoemaker without shoes. How students wrote phishing emails "Clouds": what is the advantage over the corporate server Cybersecurity Trends from BI.ZONE VR game on blockchain using ERC-1155 token: React 360 or Unity? Modification to the game based on dll-wrapper Capturing the signal of muscle activity in the system of machine learning CNC in the hobby workshop (part 1) Shining 3D FreeScan X7 / X7 + 3D Scanner Review Moving an object by clicking a button in Unity3d on C # Popular budget wearable radio stations FaceTime bug allowed to overhear and spy on iPhone owners The story of one landing: attracted many customers and was copied under a hundred times Arduino collaborates with Google and introduces certification. Civilization Springs, 1/5 Jaxb (XJC) generates classes from XML Schema (XSD) with annotation class and field descriptions. Xjc plugin Give a book reader in every pocket! The review of fresh novelties from ONYX BOOX Record video with automatic free-pause free software with bicycles Attack model: where e-procurement is mostly abused and how it is dealt with Sharding in Blockchain Lamp Design Combo Intel Optane Memory H10: Optane + QLC 3D NAND Cache Its video platform - ffmpeg and video encoding quality. Part 2 Twelve ways to understand that you are in virtual reality. Other GitHub: Data Science Repositories, Data Visualizations, and Deep Learning Repositories What's new in Swift 5? Skin math: growing the epidermis based on mathematical modeling Admin@kremlin.ru account found in thousands of MongoDB databases “I was very negative towards Korutin”: Artyom Zinnatullin about Android development Correctly “prepare” the prototype. Case Prototyping Technologies How to test in Autotech: MindMap's, static code analysis and MockServer Splunk 7 Implementation - the first book on Splunk in Russian Authorization in ESIA on the terminal server with EDS according to GOST-2012 Tips from the technical director of an IT company to a bootcamp graduate The book "Machine learning and TensorFlow" PVS-Studio ROI PHP for beginners. Session How to win in digital WorldSkills? On a practical example "Vkontakte" allowed to hide certain records from the police Welcome to SphinxSearch-meetup SuperJob Open webinar "Pairwise Testing Method in Black Box Testing" The new attack of the Shade encoder is aimed at Russian business users. Multithreading in Node.js: module worker_threads Why is TypeScript based on every new web application in PayPal? React Training Course, Part 12: Workshop, Third Stage of Work on a TODO Application React Tutorial, Part 13: Class Based Components Microservices. Versioning in continuous integration and CI / CD deployment systems using TFS as an example Autodoolers and automatic greenhouses: how a small high-tech farm works "Modern" dining philosophers in C ++ through actors and CSP Successes and failures in creating your project (startup) Configure reverse proxy for Nextcloud and ONLYOFFICE Apple or Soul Electronics: “championship” and relevance issues for wireless fitness headphones CRM for small business: the secrets of successful implementation Setting up Zyxel smart hardware in standalone and cloud modes CES-2019. Main results In Germany, in 2018, renewable energy led by the wind provided more energy than coal Nasdaq and Citi are investing millions of dollars in a startup to introduce blockchain in financial markets CNC in the hobby workshop (part 2) Caterpillar unveiled an electric 26-tonne excavator with a giant 300 kWh battery Quick payments: worries about banks RedisPipe - more fun together You don't need a blockchain: 8 popular user cases and why they don't work Popular open source - part two: 5 tools for managing the cloud Android, Rx and Kotlin or how to make the claw of Lego shrink. Part 1 3blue1brown and MIT in Russian Career steroids. Real stories The evolution of context switching x86 in Linux How to geocode a million points on Spark in a quick way? Remove unnecessary features and products to improve your business. Kalman filter to minimize the entropy value of random error with non-Gaussian distribution Interactor Pattern (Interactor, Operation) Evaluation of spatial orientation, or How not to be afraid of filters Mahoney and Majvika My address is not a house or a street, my address is the Soviet Union? Checklist: what to do before running microservices in prod 10 informative YouTube channels in English that you have never heard of How did generation Y turn into a burnt-out generation? "Yandex.Telephone" is not in demand [Announcement for Ekaterinburg, Novosibirsk, St. Petersburg] QAutomation Test Session: We will cover everything from the Neva to the Ob with tests Russia has become an exporter of cloud services: foreigners are forced to buy Russian hosting Facebook pays $ 20 per month for installing its pseudo-VPN Powering the electronics from the Wi-Fi signal How to establish a production cooperative. Freelance IT Guide (translation) Sandbox for engineers: how best to build their training PHPDump - Debugging in the Google Chrome console and interacting with CMS MODX Ex-Communications Minister invites investors to buy out a stake in the operator of the OneWeb global satellite network Analysis of the available data of the January attack, in which virtual threats had to really respond The nuances of working tools Target Length and Tuning Meter in PADS Professional / Xpedition Books worth reading to every product manager. Spring, bytecode, JDK: JBreak 2018 top 10 reports Where data goes: 12 attacks, hacks and leaks Not blockchain Flashing vintage LEDs or as we warn of "fires" on the project SEO and context: what to choose and whether to choose? Rails + Postgres + bindings In search of a silver bullet: Actors + FRP in React Analysis of the impact of musical media on the environment: digital music, analog recordings and CDs Dex-Net 4.0 allows ambidexter robots to choose the best capture Event digest for HR-specialists in IT for February 2019 Numerology on MS SQL - an entertaining experiment Piter GraphQL: Wrike Mitap Videos Graduates of IT internships at Raiffeisenbank - about how it was Many hieroglyphs - many neural networks: how to build an effective recognition system for a large number of classes? Neutralinojs - an alternative to Electron that consumes less memory GOSINT - open source solution for managing indicators of compromise (IoC) Installation of video surveillance systems: beautiful and unfortunate stories with cameras Consent to the processing of GDPR data: a detailed analysis Falcon anatomy How we overclocked the work with the parameters of the configuration of the frontal system Place strings in template parameters Google Must Split How to make a batch of unique shoes in China Emigration from Evernote to Google Keep: my personal experience US data brokers sell geodata without user consent - their work will be regulated Healthy people cortege Genetics and chickens: human CSF1-Fc protein in egg white The interaction of the site in the browser and locally running programs How to hack an expensive camera so that your wife won't kill you Prize named after Ilya Segalovich. The story of computer science and publications on the occasion of the launch Apple is unable to move production of its devices in the US Yellow - Vacuum - Cloud Overview of IPSec in Mikrotik Creating your first ARCore application We register a real estate transaction online The study showed the benefit of moderate piracy for producers and distributors of content. Bank of America report: 700 quintillion dollars from space Bill Gates and the fast sodium reactor What are the procurement procedures (in simple terms) Dell Inspiron 14 (5482): an economical 2 in 1 with good features for upgrade Antiquities: 1999 Internet in 20 screenshots If the project "Theater", use the actors ... Samsung smartphones will soon receive 1 TB of internal memory JavaScript: Public and private class fields Swift compiler device. Part 1 26 recommendations for using the var type in Java In 2020, Microsoft will stop supporting Internet Explorer 10. Civilization Springs, 2/5 Proof of Concept: How to verify that ML implementation is worth the candle US technology startups face new state control measures in 2019 OpenSceneGraph: Event Handling Yandex has established a scientific prize named after Ilya Segalovich Moscow has chosen a city Wi-Fi operator, it is obliged to install a DPI traffic filtering system Government quarter. Pilot Troubleshooting the installation of the .NET Framework 3.5 on Windows 8 on a network with WSUS Transparent video glasses with HDMI and USB-C ordered? Meet: Epson Moverio BT-35E Translation "Prepare your applications for 64-bit requirements" IT digest of February events Confluence for a public knowledge base: changing the design and customizing the division by languages As a designer, I refuse to call people "users" Load testing of CPU and SSD cloud hosters: compare Selectel, Servers, MCS and Ya.Oblako Compress the list of IP-addresses in the best way GitHub Action Life Ignorance of the principles of information security is not an excuse Why not take off the real estate portal. Part 1 Eclipse Releases GlassFish 5.1 for Java EE 8 "Modern" C ++: crying session with lamentations Cyber-physical systems in the modern world Encryption of traffic in Direct Connect, part 1 [PixelKnot] 0day-vulnerability in the field of steganography Love Kubernetes at Mail.ru Group: February 14 As we send SMS from the cave Definition of "toxic personality" in IT Teaching children programming "Deleting" objects in Django Working with time zones in javascript Fearless defense. Memory Security in Rust Apartment Automation with HomePod, Raspberry Pi and Node.js Search for Twitch Streamers in a PUBG Match OpenSceneGraph: Plugin System Why teach, if you develop more profitable. Conversation with geekbrains Apple moved user data to Russia The amazing creativity of digital evolution Subcontract? Cool you got Radiation: Everyday radiochemical laboratory Mobile Lab on Android for penetration testing Instagram uses machine learning to remove fake subscribers. Network Automation with Ansible: command module Check Point Maestro Hyperscale Network Security - New Scalable Security Platform Basics of Signed Distance Field in 2D How to master the syntax async / await: a real example VSaaS 2025: Future Video Surveillance Technologies 5G in Russia: why do you need, how much does it cost and when will it appear? Briefly about the main thing How much did the salary bubble for programmers get? Adams State University. How to hack websites. Part 1 Adams State University. How to hack websites. Part 2 Transition to 3D: the impact of chip architecture and recording algorithms on SSD life Automated Smart Contract Audit Guide. Part 1: Preparing for an Audit Automated Smart Contract Audit Guide. Part 2: Slither Media: iCloud could have a data leak that Apple tried to hide Why cheats friendly AI in Ghost Recon Wildlands How do they do it? Overview of cryptocurrency anonymization technologies How to learn to program in 9 years by yourself A comprehensive guide to professional search for hidden cameras and spyware Video of the descent of the rover "Yuytu-2", its first meters on the surface of the moon. Two week sleep on the moon is over SQL Server Data Warehouse Fast Track (DWFT) certified architecture: what it means and how it works Former NSA operatives spied on the victims' iphone for the UAE A smartphone that you never buy is available for pre-order for $ 1300 Replication of the world's first digital voice scrambler Discarded smart bulbs are a valuable source of personal information. Cybercrime as a service: services and prices NASA continues to attempt to contact Opportunity Reverse engineering. Story. My The launch of OneWeb satellites was postponed due to problems with the "Union" Man, pause on caught exceptions Organization of search in a web page in JavaScript (without jQuery) Towards the physical principles of biological evolution Push message server Why developers are more expensive than money, how to save and increase them A brief history of one "smart tape" Yii 2.0.16 Why you should think about functional programming. How I Keras on C ++ started Israeli scientists have developed a universal treatment against cancer Neutralinojs - what are you? Or UNIX way, where they did not expect Price composition in the Javascript world ReactJS + MobX - experience using DI Clouds and countries: national cloud market features Analysis of 112654 test items and trends in the labor market of programmers in 2019 Civilization Springs, 3/5 AI in 2019: the current state of affairs Educational program on electrical injuries (part two): Longrid about first aid and resuscitation Government agencies found a way to sabotage domestic software I am stuck! Or how to overcome the effect of the plateau in learning English Software Development History The idea of how to provide employees with temporary access to client resources without shining passwords Food for Bitrix parrots. We test the performance, we select the iron Forwarding requests from Apache to Payara Server 5 in Ubuntu Google paid a fine of half a million rubles Benchmark as a basis for deciding to change the code What is PC Speaker capable of? Why isn't the privacy policy template right for you? OpenSceneGraph: Levels of Detail (LOD) and Background Loading of Objects Configuring Single Sign-On in Zimbra Collaboration Suite Conference DUMP-2019 will be held on April 19. We invite you to perform in the Frontend, Backend and Science sections. Database serialization A quick way to add notifications to an Android application SciPy, graph algorithms "Crutch" for the Chinese laser The colony. Chapter 23: Test Drive Worldwide sales in December and in 2018: 2 million sold plug-in electric vehicles Complex modular architectural environment in UE4 Courier: Dropbox to gRPC migration On the issue of buffers (ring) GitLab 11.7 is released with Releases, multi-level nested epics and a registry of NPM packages Post correctly: 7 ideal places for video content Reputation, work and emigration: how to use company promotion tools to solve personal problems Unity 2019.1 beta release Initialization in C ++ is really crazy. Better start with C Python + Raspberry Pi + Pixhawk and quadrocopter. Or how not to do robots How to quickly prepare for the interview, which will be questions on algorithms and information processing technologies? On the good side: how Optimus Prime brought Kingston and HyperX to CES 2019 My second winter without snow or master in Belgium Human brain activity was first translated into clear speech Composition against inheritance, the team pattern and game development in general Data compression by Huffman algorithm As a year I did not work at Sberbank When to save the length of an array to a local variable in C # Creating your own jsfiddle part 2 Strategic Equalizer Artificial neural networks grow navigation cells like in the brain Hipster podcasts # 1 Modbus on the Russian microcontroller K1986BE92QI Under the hood of the chat bot: what can and how does RocketBot work Teamlead Conf 2019 Msk: about another communication format Trends in document management and data storage for 2019 How we created a recommendation service for the selection of clothes on neural networks Watching movies at home: 10 materials about building a home theater and choosing equipment Analysis of module binding approaches in Node.js Lombok, sources.jar and convenient debug Another manifesto Managing state and events between components in a GameObject Sawing data with comfort Writing XGBoost from scratch - part 1: decision trees Writing XGBoost from scratch - part 2: gradient boosting Apple's very strange A12X microprocessor casing About quantum computers: how different countries develop this technology CS 2018 New Year's competition Basics of Flutter Application Architecture: Vanilla, Scoped Model, BLoC Popular open source - part three: 5 tools for developers How the IT giant's audio captcha “got around” a second time Automatically generated passwords in iOS 12 Antireyting 2018 Frontend for backend developer Custom googleTranslate widget for the site Thunder in heaven or Why should not use FlylinkDC ++ What to look for when choosing a reader - talking about the form factor and the display Workplace and 4k @ 60Hz Saving user data after page reload React & BEM - official collaboration. Part of the historical SciPy, input and output in MATLAB Parse the protocol pager pocsag messages, p1 Bitrix in conjunction Nginx + PHP-FPM, CNC setting, as well as a composite cache with feedback via nginx. Modified configuration Graceful degradation. Report Yandex.Taxi Figma Adaptive Templates: how to make a flexible design component of iOS mobile navigation What is high-quality idle animation? Developers share their favorite examples. My way novice game developer Bonsai: family wiki engine We program the switch through passage. MicroPython on esp8266 (sonoff) with OTA. Part 1 The digest of interesting materials for the mobile developer # 284 (January 28 - February 3) Notification of changes to the shared state of SharedState in components Google+ Sic transit gloria mundi ... Hardcore 2D RPG Gamedev Diaries, vol.0 - INTRO, or "how did I get here" The offices are either too hot or too cold: is there a better way to adjust the temperature? Defective Embedding of Functions in Go Parse the protocol pager messages POCSAG, P2 Open electronic currency with high transaction rate Basics of reactive programming using RxJS Security of machine learning algorithms. Protect and test models using Python About creating budget stereoscopic images on fingers (stereogram, anaglyph, stereoscope) Comparison of BI systems (Tableau, Power BI, Oracle, Qlik) Rocket 9M729. A few words about the “violator” of the INF Treaty IDA Portabelization OpenSceneGraph: Integration with the Qt framework The government will finalize the law on "spy devices" How to learn to learn The day I fell in love with fuzzing Swift compiler device. Part 2 Manager vs Programmer “Look for stories that drive”: podcast about podcasts, editorial work and media careers Attackers use YouTube’s copyright strike to extort money from authors UTF-8 encoding in Wi-Fi passwords and names (Emoji) "Rostec" began selling office phone "Cruise-K" for 85 000 rubles 3CX webinar plugin for your WordPress site Apps from Google Play with millions of downloads stole user photos and advertised porn Commemorative launches of Iran's cosmonautics Windows error messages will be much more informative. PCIe 5.0 bus is ready for commissioning If Pascal’s CRT module were in JavaScript Flying saucer with inerzoid. Push off from everything How has the process of support sites for the last twenty years Swift compiler device. Part 3 Tragedy systemd Map of the accident Simple examples of sending GET and POST requests for Java using the Rest-Assured library The digest of fresh materials from the world of the frontend for the last week No. 350 (January 28 - February 3, 2019) Update overview of Veeam Backup & Replication 9.5 Update 4 Using graphs to solve sparse systems of linear equations "Red is steeper than blue": color hierarchy in different cultures Internet man Y Combinator: How to close a company Amateur Radio Measurements: I2C Bus Signal Analysis Tangle of like-minded people DevDay for Managers: Manage IT Manage secrets with HashiCorp Vault On the way to the physical principles of biological evolution. Continuation Infrastructure as a code, we win on a scale (Kirill Vetchinkin, TYME) Civilization Springs, 4/5 Accounting directly in the bank: how to make PI happy How we did network monitoring for 14,000 objects Why Google is changing the standard interface URL in the browser DBX: an attempt to get rid of MySQL queries Chromium Sixth Check, Afterword Extracellular DNA, as a biomarker of aging and various pathologies As I helped Alice not to respond to other names. Internship in Yandex Handling keystrokes aka shortcuts and debugging HX711 ADC from 3.3V - do not trust the Chinese documentation and not only All the best at once. The brightest blog articles LANIT on Habré - 2018 Compilation @pythonetc, January 2019 FSB proposed to release Russian SIM-cards and use domestic cryptography for 5G Problems using the service Yandex.Metrika Environmental monitoring in the server room (Bolid + Zabbix) QuadrigaCX cryptobirds will not give away $ 137 million. Only the director knew the password from the storage, and he died. Using All Flash AccelStor arrays in VDI projects Details about javascript objects Learn Docker Part 1: Basics How to work with cyber prospecting data: learn to collect and identify indicators of system compromise PHP Pear hacked and unavailable Summer programs for 2019 for teaching teenagers to programming abroad We are waiting for everyone at the next CocoaHeads Meetup Problems of artistic translation ModelMapper: round trip HTTP / 3: from root to tip Quality frontend code in HH A sober look at Helm 2: “This is what it is ...” UDB. What is it? Part 5. Datapath. Useful stuff Short course on managing remote teams Lazarus - write component for sprite animation How not to miss the budget for the mass production of buildings: 20 examples from the practice of the Bureau of Engineering Design Does the designer have a new idea? What could be easier Monitoring the temperature of the server itself Digital events in Moscow from 4 to 10 February Pride and Passion, the story of turning a dream into a space project Putting in order playlist Torrent-TV ("Superwash") Moscow JS 44 - Announcement New GSM Gateways from OpenVox Explaining the physical essence of the Wing Lift phenomenon without using the Bernoulli equation Sagi from life How to use segmentation, targeting and positioning (STP) in developing a marketing strategy Deploim isomorphic web application on the example of Nuxt.js Builders against Java syntax Security Week 06: Live on FaceTime Lombok returns greatness to java Start friendship with VkNet How to shorten the time-to-market: a story about test automation in M.Video The appearance of the film in the torrent after the premiere increases the box office by 3% When to use var, let and const in Javascript [translation of the article by Tyler McGinnis] The probability of winning the match with a certain probability of winning points True story advertising agency from the provinces: ups, downs and the introduction of CRM Morty, we're at UltraHD! How to watch any movie in 4K by drawing it through a little-known neural network Why Windows in 2019 does not steer, or ChYDNT? Postgres in retrospect What is a corporate blockchain? Business do not worry Chrome reverse and installation of extensions On the way to the physical principles of biological evolution. Finish + full translation Using DBREPLICATION when rolling out databases on Microsoft SQL Server Training Cisco 200-125 CCNA v3.0. Cisco Certified Network Specialist (CCNA). Day 1. Network Basics Samba as an ADDC on Solaris 11.4 Notes phytochemist. Potatoes. Part Three Bulba Fugu or SOLANIN Avalonia first meeting Encryption of traffic in Direct Connect, Part 2 Notes IoT-provider: nine problems of the Internet of Things, or why it is not good in Russia Telegram again distributes money for developing simple CSS templates. AI party in Silicon Valley: mayor, billionaire, presidents, geniuses, processor developers and a girl with bright hair The authorities fundamentally change the strategy of control over the Internet Pattern Recognition in Eidetic Artificial Intelligence Creating and configuring a portable assembly Jupyter Notebook and Lab on Windows. Part 1 BotMan acquaintance Open course "Deep Learning on the fingers" DateTimeOffset (Strict) Why do you need low-level optimization on Elbrus or how to speed up the recognition system by one and a half times The Central Bank launched a robot to search for earnings schemes on the Internet What can you learn when developing an audio player for different browsers? Combining Signed Distance Fields in 2D Magnetite in the teeth: sequencing of transcriptomes of the tissues of the radula of the shell of mollusc shell ILV confirmed the existence of its "space station" How I abandoned Ruby in favor of Python, working on a backend For the most part, a positive outlook for the future of chips. Who really stands behind popular free VPNs? The history of wandering documentation Haproxy, or what you should pay attention to when it is configured Marking shoes in Russia: The market is not ready, but will have to work It is said that Haskell is a language for geniuses and academics. True? The brain from the inside (Visualization of the passage of the pattern through the model of an artificial neural network) Virtual reality helps to cope with mental disorders The book "Spring. All design patterns » Spring Boot 2: what's new? Kubernetes tutorial, part 1: applications, microservices and containers Kubernetes Handbook Part 2: Creating and Working With a Cluster React Training Course Part 14: Workshop on Class Based Components, Component State React Training Course, Part 15: Workshop on Working with Component State Developer Diary or Bad Decisions Intel Xeon W-3175X, hot drummer. Testing Company network and MitM. Part 1 CGDevs Moscow Meetup # 2 Spatial manipulation in 2D using Signed Distance Fields How to stop "writing TK" and start working? How AI helps to master sign language Mail.ru has released a new Atom browser with an emphasis on "security and privacy" How is the consolidation of archives in DeviceLock DLP Telephone directory of the organization - print version Static Generic Tables Setting up Sphinx search for an online store Ticket to Ride. Europe - arithmetic, part two CNC in the hobby workshop (part 3) Results Slurm-3 How to improve network perimeter protection? Practical recommendations for Check Point and not only A lot of managers Amazon and Google are planning to enter the energy market Group-IB Webinar: Red Team or Pentest 12.02.2019 The main thing is not to get into the mall under the reconciliation of hours Making a neural network: how not to break the brain To isolate the Runet need budget funds Puma is looking for beta testers for self-tapping sneakers Fi How to safely combine the network segments of the three major banks: share tricks Training Cisco 200-125 CCNA v3.0. Cisco Certified Network Specialist (CCNA). Day 2. OSI and TCP-IP models Cement Brand Integration 7 types of customers Anisoprint Composer: 3D printing of high strength Typical mesh error (Bootstrap Grid), or why the designer and layout designer do not understand each other Operating system on Rust. Page memory: advanced level Spam campaign “Love you” redirected to Japan China refuses anti-corruption system Zero Trust AI because of its high efficiency Password Checkup extension checks passwords with a base of 4 billion compromised accounts In which applications to wait for an unknown malicious code? Perm programmer arrested for creating a mobile application through which the pedophile acted Unobvious RabbitMQ in Yii2 or why RabbitMQ writes to all queues at once Walk through the plant of desires Causes of ANR and how to avoid it Scientists have found the oldest living vertebrate on Earth Buildbot: a tale with examples of one more continuous integration system Sasha Memus, Chatfuel: How to build a career in products after consulting, is it dangerous to meditate and how to change behavior How to adapt UX / UI for permissions Russians are 20% more likely to face insults on the Internet Redux Simple as a rake Programming in Russia will be introduced from primary school Amateur radio measurements: when there is no frequency meter Creator Kate Mobile arrested for using a pedophile for his service New in browsers: Firefox 66 blocks video and sound by default, Chromium limits page budget Simplicity and complexity of primitives or how to determine unnecessary preprocessing for a neural network If software is created with public money, the code should be open. Requests from users and product requirements How to organize the work of QA. One practically applied method 13 trends in the cybersecurity and information security market 2019-2020 Unforgettable old age Russian scientists are developing sitall (unbreakable glass) for LG smartphones What is the difference between 4G and 5G? Working with callbacks in React Important message about invites in profile Design maturity models Working with nRF51822 using ST-Link and Clion + OpenOCD Who should pay transaction costs Salaries in IT in the second half of 2018: according to the “My Circle” salary calculator How do freelancers live: book cover design, own production of backpacks and travel work DataArt Launches Free CV Duck Resume Improvement Service Algorithm state: what happens to indie developers on Steam? How to debug front-end and backend: step-by-step instructions mmWave on the road to commercialization in the form factor of a smartphone Cellular operators will help banks verify the accuracy of customer data Extending the assert () macro to implement minimal error handling Safe Internet Day: what threats to pay attention to in 2019 How do we distribute orders between drivers in Yandex.Taxi UX Editor: True Story, Rial Life Controlling a character with SharedEvents JPMorgan analysts: Apple should buy Blizzard, Netflix or Sonos to reassure investors Generation of barrier islands Composer for the smallest Detection of web attacks using autoencoder Seq2Seq Increasing the efficiency of photosynthesis by genetic modification of plants Java after volcanic eruption pudge embedded database in 500 lines on golang VC bot on the knee, or how to please people February 14 What is API management? Again about the Voronoi diagrams JAMstack: How to create your blog using Gatsby + Contentful + Netlify xenvman: Flexible environments for testing microservices (and not only) Play Store now accepts progressive web applications (PWA) Joomla Digest for January 2019 FAS strongly recommends to pre-install Russian software on smartphones and laptops sold in Russia Alan Kay: “Could the ancient Romans build a computer?” 6 reasons to develop IT career in Armenia Our all The author of the book "The Witcher" will still receive compensation from CD Projekt Red Deploy the code directly to the docker container. Or how not to prokrasinirovat after each commit How to lead complex technical projects without hiring PMs: DataLine experience The experience of creating an Android game alone from scratch and how it was captured on Google Play How VR, AR and 3D printing work together: the VR Concept experience An example of parsing C ++ code using libclang in Python ACS my LCD - security on two bolts Trautonium: the German wave in the history of synthesizers Effects of filtering SVG. Part 1. SVG filters 101 SciPy Optimization Accelerate compilation in Xcode to swift Google has agreed to remove from the search banned sites in the Russian Federation Translation review "If software is created with public money, the code must be open" Soviet license plate and Kolmogorov complexity What would the Internet system look like in the game EvE Online Statistics for file types in the Wildfire cloud sandbox Product Design Digest, January 2019 [Ekaterinburg, announcement] Mitap for Java-developers Kill cancer: iridium, human serum albumin and some blue light Why not take off the real estate portal. Part 2 Speed up complex calculations with minimal RAM Seven strange ways of dealing with recluse in remote work “I stopped doing what I see no point in”: project managers about their work and training Win procrastination gaming addiction How to diversify programming lessons for children of different ages OS Sailfish renamed OS "Aurora" Using a binary tree in swift using enum using OCR as an example Electric Ford F-150 EV - in the prototype and tested on the road Okay, google! Are you good or evil? How PageRank works: implementation in the R language through linear algebra and power-method About 2 billion rubles allocated for the implementation of the draft law on sustainable runet We are looking for a needle in a stack without using well-known algorithms. Forget about privacy: you still have terrible targeting GDPR backup — what a new tool will do Winter DIYorDIE Meetup February 17 To be like a troll: how monopolists rule patents Laravel + Docker: Our Successful Experience Vision falls after laser vision correction - what to do? Or, doctor, make me an "enhancement" Artificial intelligence as a machine of inventions Making a bot prototype for fighting in Clash Royale Rust news # 5 (January 2019) Nontrivial metrics of the effectiveness of advertising campaigns Excel metadata files Training Cisco 200-125 CCNA v3.0. Cisco Certified Network Specialist (CCNA). Day 3. Subnets How we teach Software Engineering at St. Petersburg HSE Oculus Go glasses with “strawberry” content set up for sale Automation of three nails Animations in iOS applications born on the server For those who want to play detective: find a bug in the function from Midnight Commander "Interest club" The Book of Genesis?). Reflections on the nature of mind. Part I How I created an extension for Atom and VS Code: personal experience and source codes Using Ansible, Terraform, Docker, Consul, Nomad in the Clouds (Alexey Vakhov, Uchi.ru) The best innovations of social networks in 2018 The 2019 championship season is open! SNA Hackathon Launches ala ML Boot Camp 8 As a programmer dataseativistam wrote UniFi Controller Password Reset A brief history of electronic public procurement in Russia Pseudo Lens Flare Jeff Hawkins is finally ready to explain his brain research. Client for "server push messages" A-Frame Review Pentaho Data Integration (PDI), Python and Deep Learning Building the transport package without installing MODX What does a programmer need to develop games and who really is a game developer on the part of a programmer How I Fought Free Hosting and Composer Situation: a new wave of attacks with the interception of DNS queries - we analyze the basic methods of protection Believe me if you can. Water meters. part 1 How to become a Java developer in 1.5 years NestJS - the very real nodejs backend Cheaper price of small series of electronics in Russia. Case Internet radio WOLNA Implementation of Zimbra Collaboration Open Source, authorization through AD and automatic creation of mailboxes Julia. Report Generators and Documentation What you need to know about JavaScript Engine Switcher 3.0 What virtualization questions do you expect from a graduate? RS-485 on domestic microcontrollers from the company Milandr Program as Art - a new software management paradigm Hipster podcasts # 2 As we Republic website on Kubernetes translated How marketers of Maxidom lose millions flirting in groz marketing: independent usability auditing Civilization Springs, 5/5 VXinspect: part quality control in 10 minutes NASA lunar orbital probe made the first pictures of the China Chang'e-4 station - two pixels of light Where to lead the search for the perfect SCADA Germany plans to abandon coal in the near future. Automation of border control within the company Cockney Slang: Modern History and Position Entertaining C #. Five examples for a coffee break Give way, or Why does your CRM (and CRM) slow down? devleads - (not) financial motivation Get the enum data in the Automapper projection How is billing done there: when a customer and a developer speak different languages What hardware to analyze a huge shaft of information? Why are captcha so complicated Undefined behavior and truth undefined Does your Data Engineer team need it? 9 alternatives to a bad team (design pattern) High-load distributed control system of a modern NPP The era of dinosaurs or legally verified reinsurance? 00110001 00110100 00101110 00110000 00110010 Fortnite is the future, but for rather unexpected reasons. Telecom operators will conduct a "field test" of the law on the stability of the Runet What's new in javascript ES2019 Yield programming and the use of drones in oil production - 10 lectures from the conference GIS Tech Russia Community programming Etherblade.net - opensource project to create an ethernet traffic encapsulator on FPGA (part one) Nintendo makes it clear that only piracy can save the history of video games The colony. Chapter 24: Departure TDMS Fairway. Methods PMBOK and Russian design organizations New old phone. Reinvent the PSTN phone The adapter for working with the blockchain Ethereum for the InterSystems IRIS data platform Configure the Kubernetes HA cluster on bare metal with kubeadm. Part 1/3 Practical application of transformation of AST-trees on the example of Putout Why SRE is important documentation. Part 3 QLC based SSD - hard drive killer? Not really Automated design of electronic equipment Extensive review of Python interviews. Hints and Tips On the issue of transformations and other operations Project Lenergy, how to rethink portable power sources SPBm protocol as the basis of Extreme Automated Campus ESET has discovered new versions of the DanaBot Trojan. Quals: Saudi and Oman National Cyber Security CTF 2019. WriteUp Ethical Activity Automation How I accelerated image processing on Android 15 times Microsoft told about the cost of paid support for Windows 7 Finland summed up the preliminary results of the experiment with a guaranteed basic income How does the barcode work? Experimental production of electronics for the minimum price Modern religion: what do people give to Google, Facebook, Amazon and Apple? As in my Chevrolet Bolt electric car, under warranty, two battery modules were replaced, and the third was monitored The digest of interesting IT projects on Kickstarter №7 PHP for beginners. File attachment Understanding asynchronous JavaScript [Translated by Sukhjinder Arora] Why keep data in orbit Experience developing a free application for collectors OpenNumismat Parallel data update in ASP.NET Web API How to set up Continuous Deployment for your project: personal experience The crisis of the concepts of improving road safety and a new concept of its solution Getting FPGA to Python Vinyl is back and it's different Java pitfalls. Part 1 Anti-Aging: Senolithics and Stem Cell Therapy Holding SoftBank sold a stake in Nvidia due to the fall in their prices, but still earned $ 3.3 billion Internal and nested java classes. Part 1 How to transport your startup to the USA: 4 important steps Full immersion: how do we cool ASIC chips in Bitfury C # character calculator Integration of React Native and C ++ for iOS and Android About 50% of Russians are ready to sell their personal data Training Cisco 200-125 CCNA v3.0. Cisco Certified Network Specialist (CCNA). Day 4. Gateway devices Flickr introduces new rules regarding the number of photos and videos users. Overview of AI & ML solutions in 2018 and forecasts for 2019: Part 1 - NLP, Computer Vision Virtual machine performance comparison of 6 cloud platforms: Selectel, MCS, Ya.Oblako, Google Cloud, AWS and Azure AT & T sued for changing the network icon from 4G to 5G E Developed smart tissue that reacts to changes in body temperature On the crest of a wave, or “I want to go to the mainstream” - is it worth it? Introduction to programming: a simple 3D shooter from scratch over the weekend, part 1 Patent for a board game in Russia From pool request to release. Report Yandex.Taxi BLACK HAT conference. Survival lessons in a 300 Gbps DDOS attack. Part 1 Features of creating products for the US market Government procurement: a balance between the Italian strike and the Russian criminal Tails OS or how to protect yourself online Developing Elixir / Phoenix Applications with Docker Introduction to programming: a simple 3D shooter from scratch over the weekend, part 2 Effects of SVG filters. Part 2. Outline text with feMorphology Overview of AI & ML solutions in 2018 and forecasts for 2019: Part 2 - Tools and Libraries, AutoML, RL, Ethics in AI Lock-in: truth or fiction? Setting up backup and recovery of Zimbra OSE entirely and in separate boxes without using Zextras Organizing reducer through standard class Lazarus - simple animation using the TImageFragment component We deploy Kubernetes on the desktop in minutes with MicroK8s IPSec VPN connection between MikroTik and Kerio Control Promises in JavaScript The digest of interesting materials for the mobile developer # 285 (February 4 - 10) Learn product management - where? Multicore MRI Method Google is going to be engaged in the development of smart watches Why do I need a thermo-acoustic generator? Engineers "twisted" the light in the fiber - a new technology will speed up the transfer of data a hundred times Corporate fruit Writing Unit Tests on Swift for Verifying Asynchronous Tasks The digest of fresh materials from the world of the frontend for the last week No. 351 (February 4 - 10, 2019) PHP Digest number 149 (January 28 - February 11, 2019) Headless CMS - the future of content management Methane engine "Raptor" broke the record RD-180 Regular oddities in the GOST Grasshopper and Stribog algorithms Test JaCarta WebClient or store tokens in a safe NASA is looking for partners in the American industry to create a partially reusable manned lender Back pain - understanding from the perspective of modern medicine Spring Boot 2: what is not written in release notes RISEX and Julia. 5 stages of love customer and designer Valid SSL domain names for local Docker containers The biggest telescopes. From a notebook and eyes to 340 megapixel cameras and data centers. Part 1 Get acquainted with the Moleculer microservice framework Practical blockchain in business Features of approaches to design in the real manufacturing sector We are trying to write a project alone. Introduction Creating an alternative display for the Ensoniq EPS16 + and ASR10 synthesizer / sampler When will the JavaScript frameworks disappear? Disable analog. What will happen to the TV? The network appeared "analog" Findface Conference DUMP-2019: we invite you to speak in the sections Design, Management and Testing Remote control application release: Aspia 1.1.0 Prometheus + Grafana + Node Exporter + Docker in Azure with notifications in Telegram Digital events in Moscow from February 11 to 17 Principles of design reference books in 1C Enterprise Management 2 (ERP 2.4.6) Life without Facebook: less radical views, good mood, more time for loved ones. Now proven by science Creation of architecture for a new high-load startup in 2019 Security Week 07: Local IoT Device Vulnerabilities How I trained the neural network to implement the position estimation function on the Russian AI Cup CodeBall 2018 How easy it is to monitor the site Julia and the method of coordinate descent Explaining the physical essence of the Wing Lift phenomenon without using the Bernouli equation. Part 2 Critical vulnerability in Zemana products and not only Kohl, piss off ... Coax Unsolved mystery of view Unpacking: Dridex bootloader Taxation of IP in Kazakhstan how to be a freelancer? The volume of parcels from foreign online stores grew by 25% Retain inside and outside ViewModel Autonomous driving on the sidewalk through OpenCV and Tensorflow How we opened development offices Business processes. Extract BPMN model from document. Part 1 3D technology for foundry: how to create a mold for casting in a week How to name: privacy policy and privacy policy Teamlead Conf Msk 2019: Results of the Bid Campaign, Reports, Considerations Docker'ization: what every .Net developer needs to know Why did we choose Electron 3rd Turing Test: conditions of participation and prizes to the winners Hosting Node.js https server with auto-updated SSL in the cloud and how I set up the development cycle (+ git, react) CodeFest X March 30-31. Future section Vulnerability CVE-2019-5736 in runc, allowing to get root privileges on the host Simple parser for arithmetic operations Report on problems and accessibility of the Internet in 2018-2019 Personal Agile Transformation: A Flexible Journey to Productivity Will Node.js always be slower than Golang? Chips VS Threats of Containerization Technology XAMPP - virtual server setup Analysis of Minor Violations Java code on the Duerank.com platform (part 1) On "Vkontakte" sued for issuing personal data of the user of the Ministry of Internal Affairs The draft law on sustainable work of the Runet was adopted in the first reading. Increasing the informational content of errors in Go - github.com/ztrue/tracerr Cases and growings practices in a product at Epic Growth Conference Skills, self-education and programming languages for novice developers: HackerRank research When reading can be touched: a review of ONYX BOOX Monte Cristo 4 Dynamic local exposure Regression or regression in testing A bit of Ferrari: Fintech-startup Rally Rd will allow you to buy "shares" of rare cars Redirecting printf () from STM32 to Qt Creator console Point-by-round PKH locks on an OpenWrt router using WireGuard and DNSCrypt In development - every man for himself. But sometimes it leads to a dead end. Open lesson "Creating REST-clients on Spring" Favorite metrics: 5 indicators that each sales team must follow DNS proxy on Node.JS do it yourself Static analysis "BIOS / UEFI" or how to get Dependency Graph VSCode Extensions That Ease JavaScript and Vue Development Julia, Gradient descent and simplex method AresDB Demo: Uber's GPU-based, real-time open source analysis tool "Roskomos" considers incorrect to compare the engines Raptor Ilona Mask and RD-180 10 billion software exports are negligible Blooming gardens on Mars remain a dream: the Mars One project went bankrupt RunC vulnerability affecting Kubernetes, Docker and containerd Yandex has launched the Practicum online training service. Will prepare front-line vendors, web developers and analysts SPDS GraphiCS 2019 and nanoCAD SPDS 10. Working with IFC from Revit Who are the Premier Field Engineer (Development) at Microsoft and what they eat How we completely changed the interviews Myths about the work of Premier Field Engineer at Microsoft Artificial intelligence against lies and deceit How to make a solar flashlight do it yourself (part 2) Why developers of ABBYY Mobile Neural Network, Museum and Random Coffee Automatic adding of a place on the virtual server Virtual reality - parallel life with their own currents Lehmann Linear DIY or how to clone a purebred German with a good result Sales statistics of electric vehicles and rechargeable hybrids in 2018 (in the US and around the world) VKontakte sues SearchFace photo search service An example of a simple neural network in C / C ++ Will the monetization of user data trend 2019? Java pointer compression Video reports from FunTech ML-meetup CQRS: divide and conquer principle in the service of a programmer Seven cybersecurity trends for 2019 Eliminating recursion in Python IBM Watson Studio - a cloud platform for developing AI applications Introduction to the simplest neural network and its step-by-step implementation Secrets of consciousness and mathematics Hobby CNC router do it yourself. Humanities for the humanities Bulbs "All Year" Machine-synaesthetic approach to detecting network DDoS attacks. Part 1 Spring Boot 2 and JDK 8: Are you still using @Param, @RequestParam and @PathVariable annotations? Then the article is for you. As I taught Zabbix to look after my node and report problems Underwater Ultrasonic Range Finder Module The State Duma postponed the discussion of the bill on news aggregators The bill on "sustainable work" Runet - what to do before the second reading? Julia and the swarm of particles Career steroids. Basic algorithm Companies will have to pay for access to a digital profile of citizens Opportunity fell asleep forever: NASA acknowledged the loss of the rover Antiquities: modern computer from old parts New features of C # 8: switch expressions In Moscow, test unmanned tram. We talked to autopilot developers. The Chinese Changer-4 descent module and the Yuuta-2 rover are ready for the second night on the far side of the moon. Tetris games, or what is capacity management in the data center Consider a shift schedule in the mind Mobile Opera has got free VPN About mobile privacy and open source Fastest Python web frameworks in 2019 Satellite "Glonass-M" launched for maintenance due to the increased error The book "Unity in action. Multiplatform C # development. 2nd int. edition" 10 console commands to help debug the JavaScript code like a PRO CRM - cost of success, cost of error, cost of ownership Interrupts from external devices in the x86 system. Part 3. Setting up interrupt routing in the chipset using the example of coreboot Database scaling problems in high-load systems Divide and conquer, or write slowly - read quickly JDK 12 release candidate: Shenandoah, G1, JMH, Arm64. Swing bugs hit back GDPR: how to work with the personal data of your employees, freelancers and European employees of contractors As we in Yandex DMRSE counter clocked up New Foundation from Linux Foundation - it will develop edge computing The probability of winning the match with a known probability of winning points II Briefly about abstractions Open webinar "Development of highly loaded systems for PHP" Html we lost At the end of February, Microsoft will introduce HoloLens 2 VR glasses Mass hacking VKontakte [XSS-worm] Habro suicide. Rural disco Tyap-bang and in production? Why not Xiaomi m365 electric scooter is susceptible to hacking with the ability to remote control EU has decided on the rules of "copyright tax" Google and Facebook Terms of service: 99% of users simply do not understand them 20 games to teach the child programming Is 200 good or bad? Intervals: the upcoming evolution of C ++ The diverse world of embedded systems and the place of Embox in it Privilege escalation in PostgreSQL - parsing CVE-2018-10915 History of participation (and victory) in the Russian AI Cup 2018 - CodeBall SearchFace developer about the capabilities of the algorithm "Information Architecture": mitap in OZON Telecom operators who have not received equipment for an “autonomous Runet” will be able to work without problems Zimbra Collaboration Suite and MS Exchange on the same domain About linters, code quality, quality in general and quality management The colony. Chapter 25: Night Outside Creating a single operator 5G will help save several hundred billion rubles Algorithm of thinking and consciousness New approach to understanding the thinking of machines Where did the slogan "Don't Be Evil" come from? Friday Scifi on the professions of the future: "Real Girls" Russian car industry: the road to additive technologies MQTT / UDP, Pre-Spring Results: Remote Configuration and Digital Signature How I got a job with a salary of 300,000 dollars in Silicon Valley Task based queue systems Webinar Series on TDMS Fairway Technical Document Management System What ended the story with the homeless programmer For the input - the ruble, but there is no way out: how do third-party files get into the blockchain and what to do about it Remote control of UART via the Web We build the Python interpreter into a java application using the Panama project Effects of filtering SVG. Part 4. Two-color images with feComponentTransfer “Begin with mitapov”, or whether programming courses are generally needed 3CX v16 Beta 1 released with Raspberry Pi support Price quality: 7 principles for optimizing the cost of testing Biomodul 1-2 South Korea will refuse electric cars and construction of new nuclear power plants Java can still be free Roskomnadzor promised pilot checks "autonomous Runet" Moscow police will get glasses with face recognition How to launch your podcast beginner guide NASA's lunar orbital probe made new images of the China Chang'e-4 station closer and clearer How to lose your hobby and make it a successful online business in the US Who will inhabit the land of cyborgs? On the future status of the island of Russian told the director of development of the company "Motorika" "Linux social networks" - how LiveJournal became the discoverer of blogs, and then lost them We write an educational application on Go and Javascript to assess the real return on equity. Part 1 - backend The experience of introducing a virtual PBX. Communication and software in different baskets Level 80 Overagineering or Raducer: Path from switch-case to classes Translation of politically correct vocabulary from English to Russian How Project Infer from Facebook helps to find bugs in mobile apps before deploying Reddit capitalization reached $ 3 billion after attracting $ 300 million investment Vuex - excessive use of getters in the application. Parsing error Distributed chat on Node.JS and Redis Learning design standards - Entity Relationship A technology that will bring quantum networks closer Windows Phone - EVERYTHING, this again or again GPT-2 neural network from OpenAI. Fast start We write an educational application on Go and Javascript to assess the real return on equity. Part 2 - Backend Testing Reflective Shadow Maps: Part 2 - Implementation Russian AI Cup 2018, history 9 places Important changes in the CTE in PostgreSQL 12 Will electric cars be dragged to the bottom of autocorporation? What is wrong with the Raspberry Pi Exonum consensus: how it works MIT learned how to transmit sound using a laser Where do the legs of the Java Memory Model grow Martian probe InSight successfully working on the Red Planet How many .com domain names are not used? Dunning with Kruger, Socrates and circles of knowledge The digest of interesting materials for the mobile developer # 286 (February 11 - 17) The task of classification through the eyes of a schoolboy: determining whether a car is in the parking lot by frames from a video surveillance camera Training Cisco 200-125 CCNA v3.0. Day 5. Connecting CISCO devices and IOS modes Road safety issues, parse points Madness of dotfiles How it all began: optical discs and their history Corporate toilet Android Things refocus on smart speakers and displays The speed of light is not invariant Did you know that using the law of conservation of energy can be much easier to deliver cargo to the moon, the exchange of masses? The digest of fresh materials from the world of the frontend for the last week №352 (February 11 - 17, 2019) Overview of Russian legislation in the field of web accessibility Learning Python: argparse module Handwritten classification. Yandex Report The Central Bank has published recommendations on cryptographic protection of the EBU Rational Thinking Methods and Maghreb Prayer Rug Using dot charts to visualize data Hobby CNC router do it yourself. Humanities for humanities. Part 2 How to look at tomorrow igrofikuuchi - And you do gasoline in petrochemistry, right? PR in IT: how to live, where to go? Features of working with Mesh in Unity What is wrong with A / B testing Create a base scene in A-Frame Database Refactoring Toolkit: Flyway vs. Liquibase Data Science "special forces" on their own InoThings ++ Professional IoT Conference - what was and what will be Open webinar "Work: own and someone else's" How the decrease in the rate of acquiring affects us (cardholders) Data transfer between scenes in Unity - the use of multi-value in the development of simple games Selection: 4 useful services for potential immigrants to the USA, Europe and other countries Open Session In View in Spring Boot: Hidden Threat Open webinar "Customer Journey: what traffic and where to lead" AMP and Turbo Pages: Pros, Cons, and Implementation Results Selecting the priority of the user request English-language cross-platform utility for viewing Russian qualified x509 certificates Serverless CI / CD on AWS New Golden Age for Computer Architecture Employer reviews: the nature and senselessness of anonymous reviews From geeks to geeks: gifts for February 23 NHTSA's serious mathematical errors allowed Tesla to declare autopilot safety. Email, inside look Google will not block third-party ad blockers in the browser Chromium Turn off the lights and turn off the water Hi-Fi - the problem of classification: about history, standard, marketing and terminology Conference DEFCON 19. Three generations of DoS-attacks (with the participation of the audience as victims). Part 1 The release of Kali Linux 2019.1 Database cloning option for development / testing Dark Mobile on CodeFest: Functional Swift, Mistakes of Clean Architecture and #CerselyKotlin Presented by Talos - “a modern Linux distribution for Kubernetes” Sovereign LPWAN, part 1: licensing and operation of LPWAN networks in Russia - the old new requirements of the GKRCh Git and team development (for dummies) We audit bugs Practical steganography We explain the code using ASCII art Snapdragon 855: a mobile platform for 5G, AI technology and augmented reality Conference DUMP-2019: we invite you to speak in the sections of DevOps and Mobile Software protection from copying and hacking: the main methods and strategies How did we choose the DLP system (practical experience) The book "How to manage intellectuals. I, nerdy and geeky " Timer for speeches The model of a solid nucleus without electron shells, that is, the nucleus is equal to the entire atom in size English in India: a historical excursion Crypto miners penetrated Microsoft Store There are a lot of programs for learning English, but is it worth it to use one of them if you are a programmer? Patterns and anti-patterns CI / CD. Part 1 The tragic story of dating with poppler Payphones of Russia want to supplement the Ministry of Emergency Situations How I patch the Universe Realization of free movement of particles on ReactJS Web analytics for business Escape from Crypto Pro. GOST 34.10-2012 edition Patriotism in computer games: the opinion of the former gamers Additive technology and 3D scanning in mechanical engineering: 7 success stories Content marketing, contextual advertising, conversion enhancement: 6 useful guides to promote a startup in the network REST passion for 200 The Kingdom for AI: How many banks save on machine learning, neural networks and chat bots Comparing Viper and MVVM architectures: How to apply one and the other Webinar “167-FZ. How banks can meet the requirements of the Central Bank to antifraud systems "- February 26, 2019, 11:00 MSK Why do banks monopolize the blockchain? Security Week 08: Hacking VFEMail Live Determine your bio-age questionnaire I conducted a hundred interviews, refused a hundred people - and only then learned how to interview A little bit about business intelligence in IT Why did Google need a knowledge graph Redux - revision logic reducer'a and actions BYD reports growth in sales of plug-in electric vehicles. How to quickly write a website or web application and not get bogged down in collectors Don't be smart with login forms. Alternative nomad orchestrator on the desktop Communication providers are going to oblige to enter into contracts for connecting residential buildings The Ministry of Communications will allocate 21 billion rubles to support end-to-end technologies in 2019 Connecting KELLER sensors to MATLAB Has handed over the Russian hacker - you will go to prison, even if you from "Kaspersky Lab" Innopolis University will hold Russia's first international design school for autonomous vehicles Kotlin puzzlers, Vol. 2: a new batch of puzzles I scanned all of Austria and found ... Wireless Wi-Fi programmable room thermostat with air quality monitor and other useful features What gifts are waiting for men on February 23? Poll results How a decrease in the rate of acquiring will affect us (cardholders) - 2 Locomotives: what we know about the self-propelled rail carriage Google has opened a domain zone .dev JPoint 2019 Program Guide Take care of your business from your youth or how to create a thrifty startup Promotion: Bring a paper book and get a discount on any ONYX BOOX e-book reader What ended the 3rd Turing Test: statistics, interesting dialogues and a general impression Splunk leaves Russia (completely) An overview of image segmentation methods in the scikit-image library Rabbit MQ in the residents call handling system Interesting facts about the history of the Chinese lunar program and the Chang'e-4 space mission VKontakte starts selling products with AliExpress Development tools and design specifications of the program nanoCAD Mechanics How Researchers Discover MongoDB and Elasticsearch Open Databases KeeBee. Making from scratch your own USB keyboard 6 points of conversion growth or how to increase trust using the phone on the site The story of how we changed the icon of PVS-Studio Pro aggressive office Online contest for solving a problem from game theory Embedded world 2019 in Nuremberg Exhibition Center Smallest computer Lifelike design Product rebranding is probably the worst backlog requirement. Script Optimization with Webpack SplitChunksPlugin LG will introduce a smartphone with an OLED speaker screen: a few words about the new device and technology Mars tickets will cost less than $ 500,000 Where are the Early Adopters? Audio AI: select vocals from music using convolutional neural networks Simulator reading articles Kaspersky Mobile Talks - meeting for advanced developers Already no concept: Samsung introduced the folding phone Galaxy Fold for $ 1980 The President of Russia announced a theoretical threat of disconnection from the global network. Screw LDAP authentication to Kubernetes
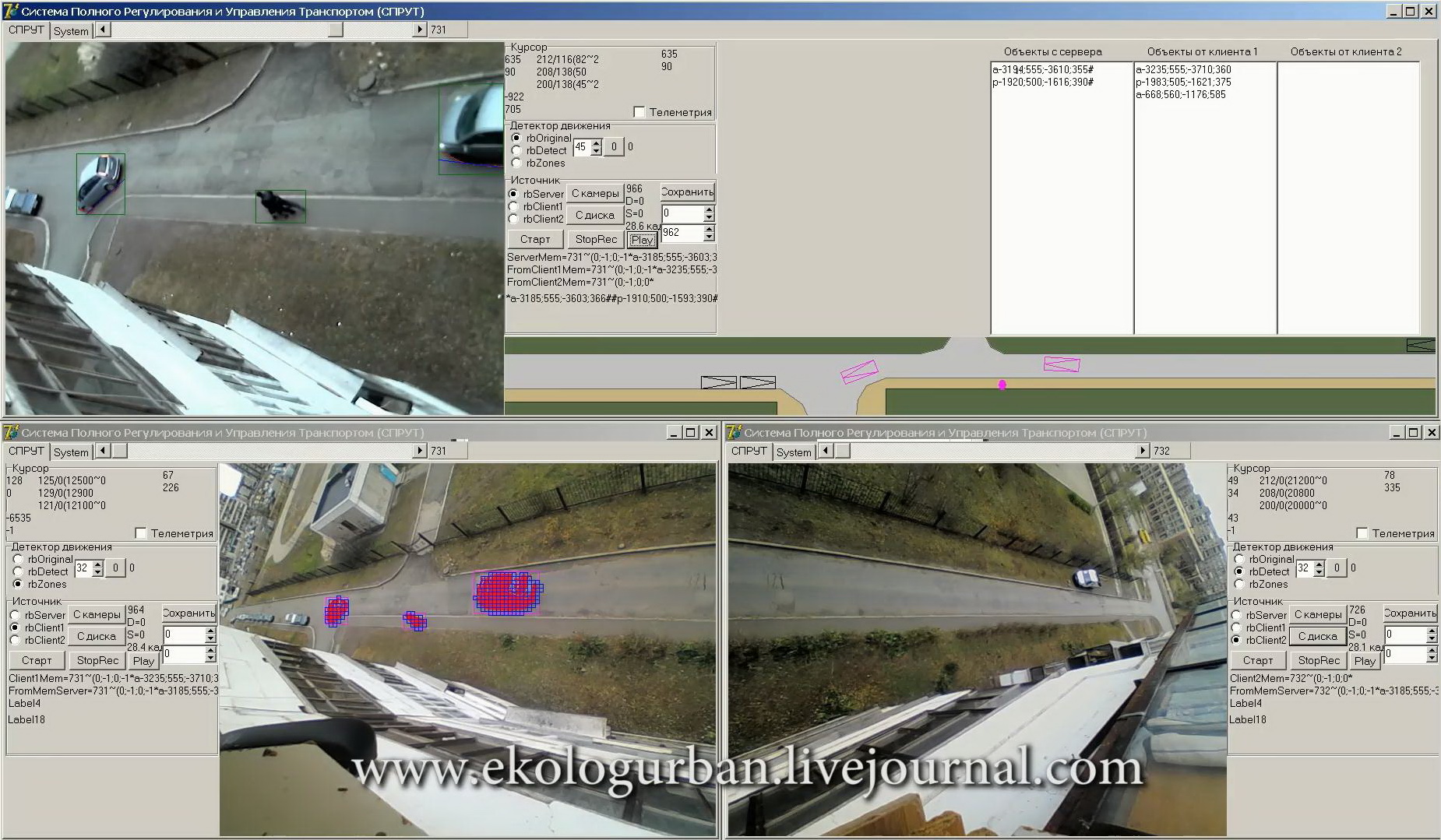
 Author: Roman Krivosheev, inventor.
Author: Roman Krivosheev, inventor.